filmov
tv
Decision-Making for Bidirectional Communication in Sequential Human-Robot Collaborative Tasks
Показать описание
Decision-Making for Bidirectional Communication in Sequential Human-Robot Collaborative Tasks
Vaibhav V. Unhelkar, Shen Li, Julie A. Shah
HRI'20: ACM/IEEE International Conference on Human-Robot Interaction
Session: Groups and Teams
Abstract
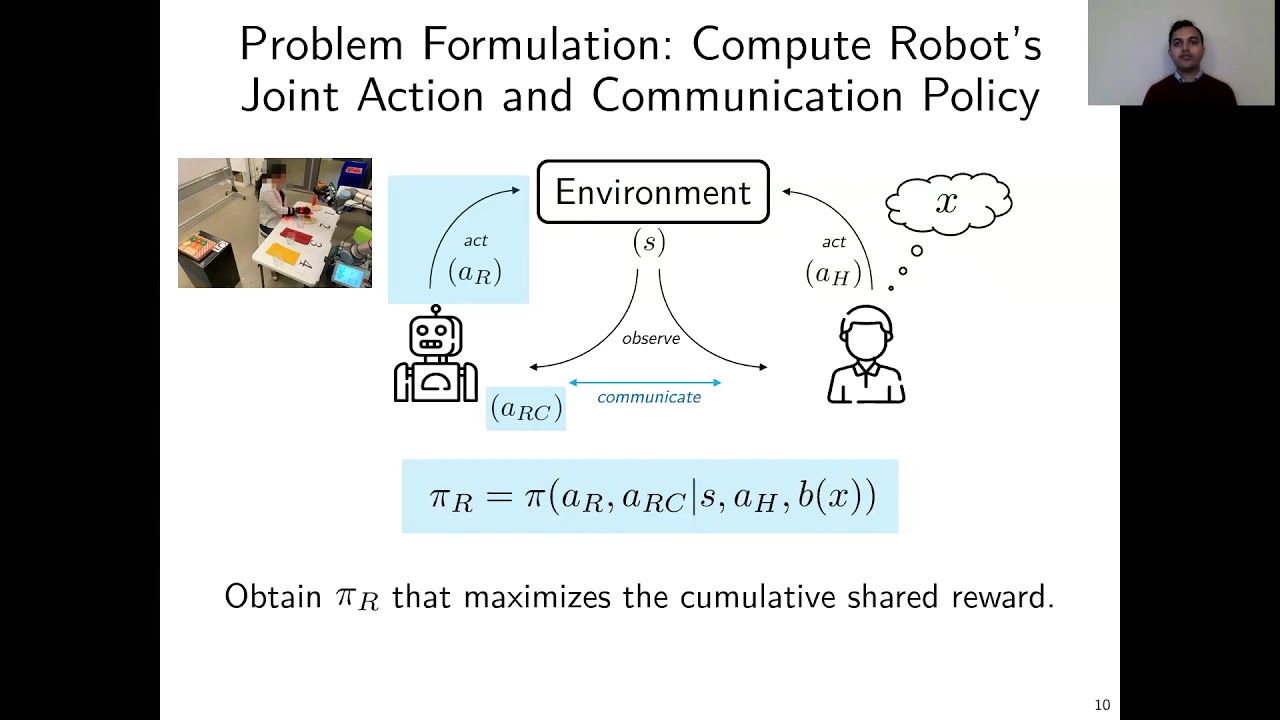
Communication is critical to collaboration; however, too much of it can degrade performance. Motivated by the need for effective use of a robot's communication modalities, in this work, we present a computational framework that decides if, when, and what to communicate during human-robot collaboration. The framework, titled CommPlan, consists of a model specification process and an execution-time POMDP planner. To address the challenge of collecting interaction data, the model specification process is hybrid : where part of the model is learned from data, while the remainder is manually specified. Given the model, the robot's decision-making is performed computationally during interaction and under partial observability of human's mental states. We implement CommPlan for a shared workspace task, in which the robot has multiple communication options and needs to reason within a short time. Through experiments with human participants, we confirm that CommPlan results in the effective use of communication capabilities and improves human-robot collaboration.
Talk for the ACM/IEEE International Conference on Human-Robot Interaction 2020
Vaibhav V. Unhelkar, Shen Li, Julie A. Shah
HRI'20: ACM/IEEE International Conference on Human-Robot Interaction
Session: Groups and Teams
Abstract
Communication is critical to collaboration; however, too much of it can degrade performance. Motivated by the need for effective use of a robot's communication modalities, in this work, we present a computational framework that decides if, when, and what to communicate during human-robot collaboration. The framework, titled CommPlan, consists of a model specification process and an execution-time POMDP planner. To address the challenge of collecting interaction data, the model specification process is hybrid : where part of the model is learned from data, while the remainder is manually specified. Given the model, the robot's decision-making is performed computationally during interaction and under partial observability of human's mental states. We implement CommPlan for a shared workspace task, in which the robot has multiple communication options and needs to reason within a short time. Through experiments with human participants, we confirm that CommPlan results in the effective use of communication capabilities and improves human-robot collaboration.
Talk for the ACM/IEEE International Conference on Human-Robot Interaction 2020
 0:02:17
0:02:17
Decision-Making for Bidirectional Communication in Sequential Human-Robot Collaborative Tasks
 0:09:28
0:09:28
Decision-Making for Bidirectional Communication in Sequential Human-Robot Collaborative Tasks
 0:04:33
0:04:33
How miscommunication happens (and how to avoid it) - Katherine Hampsten
 0:02:39
0:02:39
The Microbiota-Gut-Brain Axis: A dynamic bi-directional communication
 0:02:03
0:02:03
The Gut-Brain Connection
 0:23:01
0:23:01
Effective Bidirectional Communication: Lesson 1 - Having Conversations on Difficult Subjects
 0:00:15
0:00:15
Cosplay by b.tech final year at IIT Kharagpur
 0:02:46
0:02:46
Dijkstra's algorithm in 3 minutes
 0:09:01
0:09:01
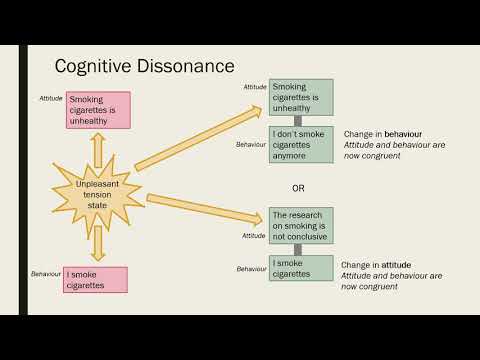
The bidirectional relationship between attitudes and behaviour
 0:09:08
0:09:08
Bidirectional SFP+ modules - What you need to know to implement them
 0:07:01
0:07:01
Don't Use REST APIs in your Backend, Use gRPC
 0:06:08
0:06:08
Master SFP Connections in Minutes: SFP connections explained. What are SFP+, SFP28, SFP56
 0:07:54
0:07:54
Bidirectional RNN Indepth Intuition- Deep Learning Tutorial
 0:14:20
0:14:20
Professionalism and Communication by G. Geis | OPENPediatrics
 0:31:52
0:31:52
Configuring Replicator for Bidirectional Replication in Direct Mode
 0:01:48
0:01:48
Bidirectional Learning Tool® (BLT) & The Socratic Method
 0:45:44
0:45:44
RailsConf 2023 - Building a more effective, bidirectional mentor-... by Andy Andrea, William Frey
 0:06:46
0:06:46
Don't Use Websockets (Until You Try This…)
 0:21:24
0:21:24
Bidirectional data flow from clinic to lab and back - Larry Babb
 0:00:28
0:00:28
Most Embarrassing Intro?! ft. Nikita Pawar | Ranveer Allahbadia Shorts
 0:03:48
0:03:48
Power Anything with USB-C Instead! (USB PD DIY)
 0:07:35
0:07:35
The EASIEST way to connect used EV packs to grid! 🔋
 0:03:00
0:03:00
Factorio Trains Explained in Less Than Three Minutes
 1:04:37
1:04:37
John Cryan - Friends with Brain Benefits - The impact of the gut microbiota on neurodevelopment and
Комментарии