filmov
tv
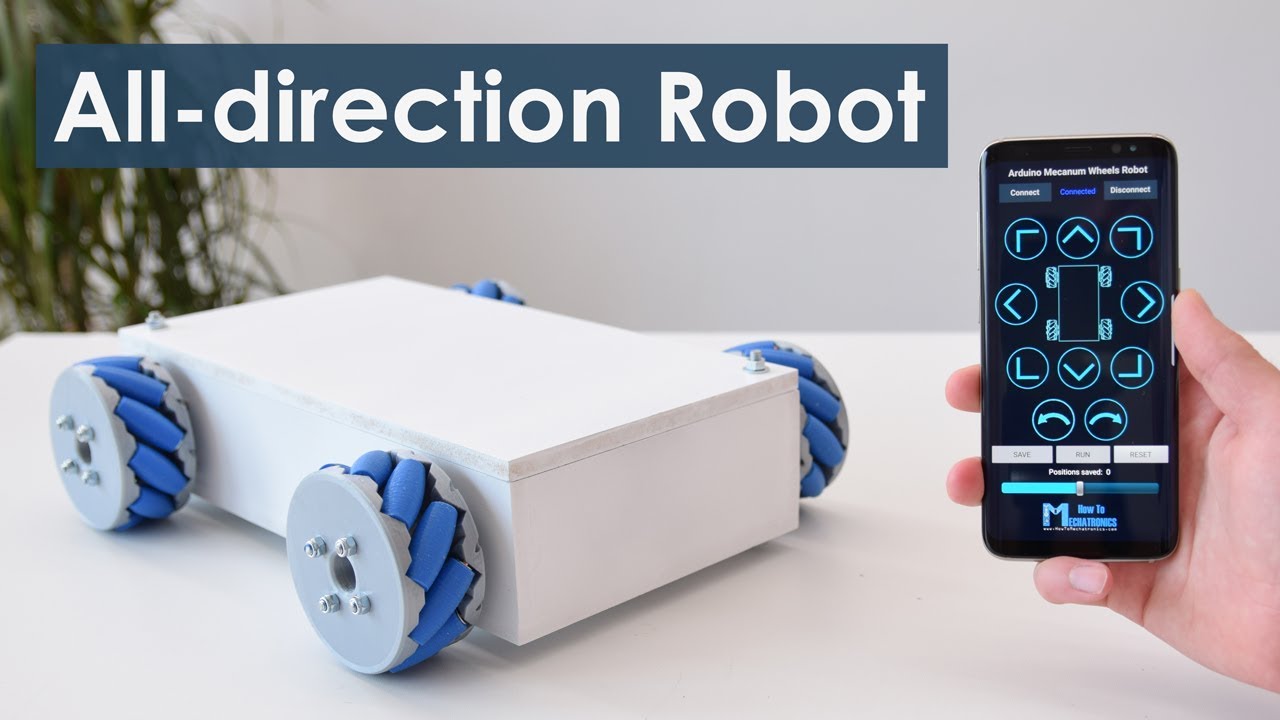
Arduino Mecanum Wheels Robot
Показать описание
Parts list (check website article for full list, affiliate links):
In this tutorial we will learn how to build an Arduino Mecanum Wheels Robot which is capable of moving in any direction. This unique mobility of the robot is achieved by using special type of wheels, called Mecanum Wheels.
Thanks JLCPCB for sponsoring this video.
Like my page on Facebook:
Music:
 0:07:23
0:07:23
DIY Arduino Mecanum Wheels Robot
 0:12:17
0:12:17
Arduino Mecanum Wheels Robot | Bluetooth Car
 0:08:07
0:08:07
Arduino Mecanum Wheel Robot Car | App and code FREE included
 0:00:16
0:00:16
The Most Versatile Wheel-Mecanum Wheel Robot Base
 0:15:39
0:15:39
Arduino Mecanum Wheels Robot
 0:00:45
0:00:45
LAFVIN Omni Directional Mecanum Wheels Robot Car Kit for Arduino UNO R3 STEM Educational DIY Coding
 0:01:01
0:01:01
Simple RC Mecanum Wheels Robot wif Arduino
 0:16:32
0:16:32
Advanced Mecanum Wheels Robot using Arduino & ESP32 CAM || 4WD Omnidirectional Movement
 0:00:55
0:00:55
25Kg Load RC Tank V3 Mecanum Wheel Robot Car For Arduino Robot DIY Kit with Encoder Motor and Ps2
 0:01:24
0:01:24
TurboPi Raspberry Pi Omnidirectional Mecanum Wheels Robot Car Kit
 0:01:15
0:01:15
osoyoo omin-directional mecanum wheel metal chassis robot car
 0:00:56
0:00:56
Arduino Powered 4WD Robot with Mecanum Wheels by SuperDroid Robots
 0:00:59
0:00:59
6% OFF!! 60mm Mecanum Wheel Robot with 4pcs TT Motor for Arduino DIY Robot Car Chassis Kit Programm
![[Wholesale] Line Tracking](https://i.ytimg.com/vi/OF9XFr5s3Qc/hqdefault.jpg) 0:01:04
0:01:04
[Wholesale] Line Tracking Obstacle Avoidance Smart Arduino Mecanum Wheel Robot Car Kit with Mega256
 0:00:45
0:00:45
Arduino Mecanum Wheel Car Sensor Drive Demo
 0:00:31
0:00:31
Moebius 4 Channel Motor Driver Board Compatible with Arduino for Smart Mecanum Wheel Robot
 0:00:58
0:00:58
4pcs set 15KG Load 96mm Omni Mecanum Wheel with 12V Speed Encoder Motor for Arduino Raspberry Pi DIY
 0:26:07
0:26:07
ESP32 All In One Smart Arduino Car 4WD Mecanum Wheel | Acebott Smart Car | Camera WiFi Programming
 0:00:14
0:00:14
Mecanum Wheel Robot Car for Arduino #robot #arduino #rcrobot
 0:07:11
0:07:11
Mecanum Omnidirectional Robot Car using the Quantum Integration System
 0:00:52
0:00:52
4WD 60MM MECANUM WHEEL ARDUINO ROBOT KIT (WITHOUT ELECTRONICS)
 0:00:21
0:00:21
Bluetooth RC Mecanum wheel arduino robot kit
 0:01:01
0:01:01
Raspberry PI, Mecanum wheels and a 8BitDo SN30 controller - Larry the lab bot V4
 0:01:33
0:01:33
Freenove Mecanum Wheel Car Kit for Raspberry Pi Pico (W) (Compatible with Arduino IDE) [Overview]
Комментарии