filmov
tv
Extending the “good regulator theorem” - Nathaniel Virgo (PIBBSS Speaker Series) 2024
Показать описание
Nathaniel Virgo is an interdisciplinary scientist with a background in mathematics, computer science, ecology and, more recently, applied category theory. He has a long-standing interest in the origin of life, and specifically the question of how something as complex and purposeful as life could emerge from a world in which it was initially absent.
Extending the classic “good regulator theorem” from control theory
The physical world appears, at first glance, to have things in it that are agents, in the relatively weak sense that they seem to have goals that they try to pursue, along with beliefs about the world that they update in the face of new information. Other things seem not to have these features. But where do beliefs and goals live in relation to the physical world, and why do some systems seem to have them while others don’t? I take the perspective that the difference between agents and non-agents is one of interpretation – goals are something that is attributed to a system by an observer, although some systems are more amenable to having goals attributed to them than others.
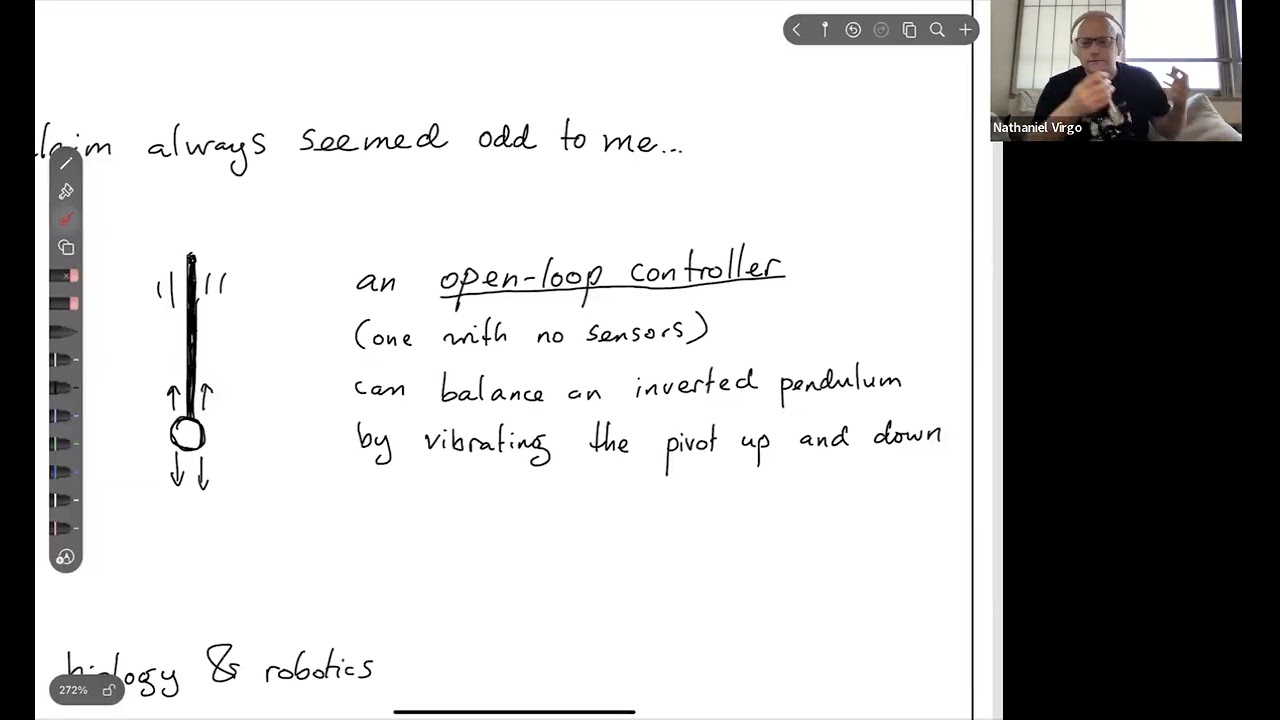
Along with my collaborators, I aim to make this idea mathematical, so that the process of attributing goals to a system can be made into a formal one, and the relationships between concepts like goals and beliefs can be fully understood. One ultimate goal is to understand why agent-like systems exist in the physical world at all. In particular, I will talk about extensions of the “good regulator theorem”, a classic result from early control theory that has been stated (somewhat inaccurately) as “every good regulator of a system must be a model of that system”. The original result concerned only fully observable systems, but using ideas from modern mathematics we extend it to a much broader class of systems that interact with their environments in much richer ways. The notion of ‘model’ also becomes richer, resembling Bayesian updating. One extension of the good regulator theorem could be stated as “every system that is a good regulator of itself must have a model of its environment”. The framework builds on recent ideas from categorical systems theory and is compositional in nature, allowing us to talk about multiple interacting systems. This leads to some interesting insights about the relationship between agents and their environments. We can conclude in particular that there is no unique place where the boundary between an agent and its environment should be drawn, although the interpretation in terms of beliefs might look quite different depending on the choice of boundary.
This talk was recorded in February 2024. For more talks, check out our channel. For information on our talks, subscribe to the mailing list, and see speaker lineups on our website:
Extending the classic “good regulator theorem” from control theory
The physical world appears, at first glance, to have things in it that are agents, in the relatively weak sense that they seem to have goals that they try to pursue, along with beliefs about the world that they update in the face of new information. Other things seem not to have these features. But where do beliefs and goals live in relation to the physical world, and why do some systems seem to have them while others don’t? I take the perspective that the difference between agents and non-agents is one of interpretation – goals are something that is attributed to a system by an observer, although some systems are more amenable to having goals attributed to them than others.
Along with my collaborators, I aim to make this idea mathematical, so that the process of attributing goals to a system can be made into a formal one, and the relationships between concepts like goals and beliefs can be fully understood. One ultimate goal is to understand why agent-like systems exist in the physical world at all. In particular, I will talk about extensions of the “good regulator theorem”, a classic result from early control theory that has been stated (somewhat inaccurately) as “every good regulator of a system must be a model of that system”. The original result concerned only fully observable systems, but using ideas from modern mathematics we extend it to a much broader class of systems that interact with their environments in much richer ways. The notion of ‘model’ also becomes richer, resembling Bayesian updating. One extension of the good regulator theorem could be stated as “every system that is a good regulator of itself must have a model of its environment”. The framework builds on recent ideas from categorical systems theory and is compositional in nature, allowing us to talk about multiple interacting systems. This leads to some interesting insights about the relationship between agents and their environments. We can conclude in particular that there is no unique place where the boundary between an agent and its environment should be drawn, although the interpretation in terms of beliefs might look quite different depending on the choice of boundary.
This talk was recorded in February 2024. For more talks, check out our channel. For information on our talks, subscribe to the mailing list, and see speaker lineups on our website:
 1:39:14
1:39:14
 0:04:54
0:04:54
 0:29:18
0:29:18
 0:02:23
0:02:23
 0:05:32
0:05:32
 0:00:38
0:00:38
 0:03:05
0:03:05
 0:27:07
0:27:07
 0:05:05
0:05:05
 0:00:47
0:00:47
 0:03:05
0:03:05
 0:02:53
0:02:53
 0:01:02
0:01:02
 0:17:24
0:17:24
 0:02:31
0:02:31
 0:02:33
0:02:33
 0:01:41
0:01:41
 0:01:54
0:01:54
 0:05:40
0:05:40
 0:39:04
0:39:04
 0:03:34
0:03:34
 0:11:57
0:11:57
 0:00:39
0:00:39
 0:00:51
0:00:51