filmov
tv
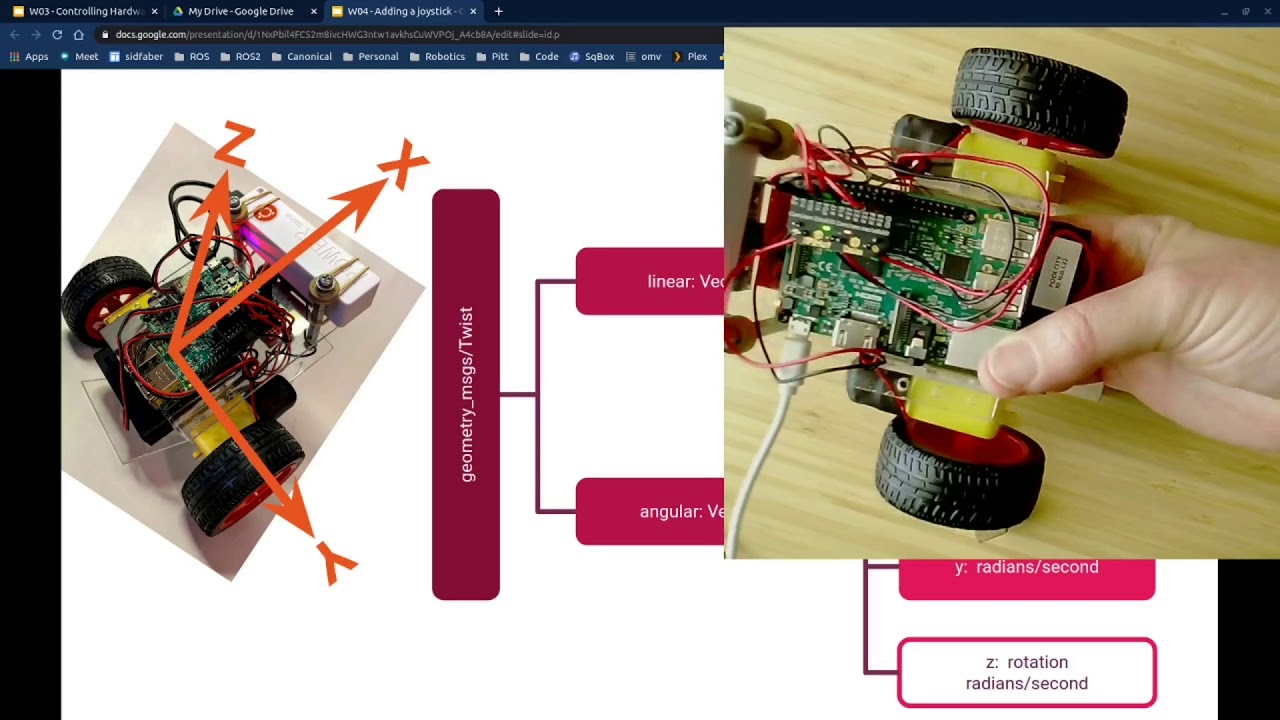
An Introduction to ROS, the Robot Operating System: Adding a joystick (5/6)
Показать описание
Sid Faber
Canonical
The Robot Operating System (ROS) is a flexible, open source framework for writing robot software. ROS has been widely used in robotics research for over a decade, and many commercial products now rely on ROS.
We’ll cover the following topics:
The ROS architecture and how to get started
Basic ROS constructs: Nodes, topics, services and actions
Installing ROS on a Raspberry Pi running Ubuntu
Controlling hardware
Remote control of your robot
Adding sensors
Where to go from here
At the conclusion of this tutorial you’ll be prepared to build your own ROS-based robot!
Canonical
The Robot Operating System (ROS) is a flexible, open source framework for writing robot software. ROS has been widely used in robotics research for over a decade, and many commercial products now rely on ROS.
We’ll cover the following topics:
The ROS architecture and how to get started
Basic ROS constructs: Nodes, topics, services and actions
Installing ROS on a Raspberry Pi running Ubuntu
Controlling hardware
Remote control of your robot
Adding sensors
Where to go from here
At the conclusion of this tutorial you’ll be prepared to build your own ROS-based robot!
 0:11:42
0:11:42
An Introduction to ROS, the Robot Operating System: Intro to ROS (2/6)
 0:06:36
0:06:36
What is ROS, When to use it, and Why ? - Robot Operating System Tutorial
 0:03:13
0:03:13
An Introduction to ROS, the Robot Operating System: Introduction (1/6)
 0:22:26
0:22:26
An introduction to ROS the Robot Operating System
 0:05:01
0:05:01
What is ROS? Why it's Important for making Robots!
 0:08:22
0:08:22
What Is ROS2? - Framework Overview
 0:21:11
0:21:11
An Introduction to ROS, the Robot Operating System: Controlling hardware (4/6)
 0:08:40
0:08:40
Five Things You Need Before Starting With ROS | Getting Ready to Build Robots with ROS #1
 0:02:28
0:02:28
01 - What is ROS? | Why we need ROS? | Introduction to ROS in less than 3 minutes |
 0:02:43
0:02:43
What is ROS (Robot Operating System)| Introduction to the Tutorials
![[ROS Tutorials] #1](https://i.ytimg.com/vi/eEAEM0n00-s/hqdefault.jpg) 0:11:45
0:11:45
[ROS Tutorials] #1 - Introduction to ROS for Industrial Robots
 0:25:27
0:25:27
An Introduction to ROS, the Robot Operating System: Adding a joystick (5/6)
 1:22:03
1:22:03
Programming for Robotics, Lecture 1: Introduction to ROS
![[ROS Tutorials] #0](https://i.ytimg.com/vi/ke8BA4wk8_0/hqdefault.jpg) 0:03:51
0:03:51
[ROS Tutorials] #0 - Introduction to ROS for Industrial Robots
 0:13:22
0:13:22
An Introduction to ROS, the Robot Operating System: Adding a sensor (6/6)
 0:04:08
0:04:08
ROS BASICS IN 5 DAYS #1 - Course Overview & Introduction
 0:26:10
0:26:10
An Introduction to ROS, the Robot Operating System: Install and put together (3/6)
 0:10:01
0:10:01
ROS for Beginners | Part 01 - Introduction to ROS | Hash Robotics
 0:00:13
0:00:13
What is ROS?
 1:08:45
1:08:45
Intro to ROS
 1:13:05
1:13:05
Introduction to ROS | Part - 1 | ROS Learning Series
 0:01:50
0:01:50
#ROSBook | Introduction to ROS | ROS Tutorial | Mastering R.O.S for Robotics Programming: A Promo
 0:09:58
0:09:58
ROS/ROS 2 - What is Robot Operating System (ROS)? - an intuitive understanding
 1:07:43
1:07:43
Introduction to ROS
Комментарии