filmov
tv
Shortest Path Algorithm Problem - Computerphile

Показать описание
A seemingly simple problem that's "in general" incredibly difficult! CEO of Redwood Research Buck Shlegeris explains his favourite algorithmic fact!
This video was filmed and edited by Sean Riley.
This video was filmed and edited by Sean Riley.
 0:07:04
0:07:04
Shortest Path Algorithm Problem - Computerphile
 0:08:24
0:08:24
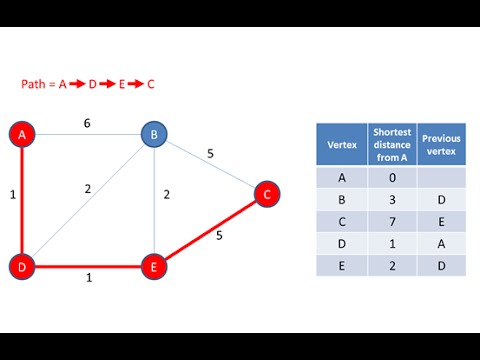
Dijkstras Shortest Path Algorithm Explained | With Example | Graph Theory
 0:18:35
0:18:35
3.6 Dijkstra Algorithm - Single Source Shortest Path - Greedy Method
 0:02:46
0:02:46
Dijkstra's algorithm in 3 minutes
 0:10:52
0:10:52
Graph Data Structure 4. Dijkstra’s Shortest Path Algorithm
 0:00:10
0:00:10
Dijkstra's algorithm is one fundamental algorithms for computing the shortest path in a network
 0:13:18
0:13:18
Shortest Path Algorithms Explained (Dijkstra's & Bellman-Ford)
 0:15:01
0:15:01
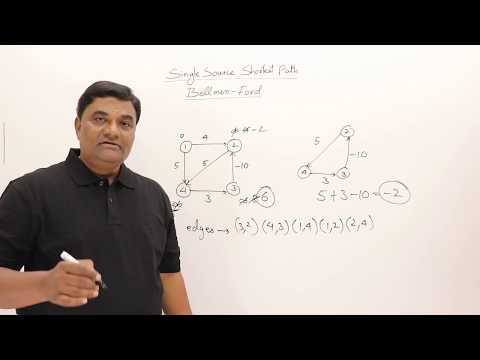
Bellman Ford Algorithm | Shortest path & Negative cycles | Graph Theory
 0:08:52
0:08:52
A* Algorithm Explained FAST! | A Level Computer Science Made Easy
 0:04:21
0:04:21
Dijkstra's Algorithm (finding shortest path)
 0:00:44
0:00:44
How To Find Shortest Paths #computerscience #algorithms
 0:14:13
0:14:13
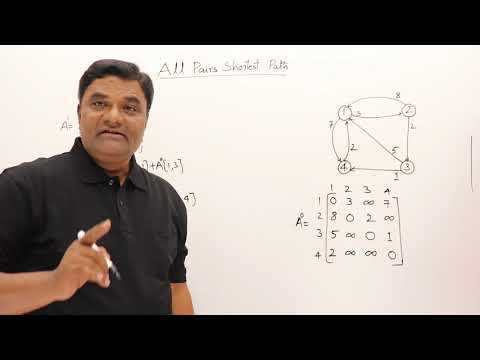
4.2 All Pairs Shortest Path (Floyd-Warshall) - Dynamic Programming
 0:00:18
0:00:18
Dijkstra's Algorithm#explore #youtube#trend#shortsindia #shorts #trending #shortseries #youtube...
 0:08:31
0:08:31
How Dijkstra's Algorithm Works
 0:13:49
0:13:49
A* Shortest Path Algorithm Visually Explained
 0:15:49
0:15:49
L-4.10: Dijkstra's Algorithm - Single Source Shortest Path - Greedy Method
![[Algorithms] Representing shortest](https://i.ytimg.com/vi/fqcSpN9sLTo/hqdefault.jpg) 0:04:25
0:04:25
[Algorithms] Representing shortest paths, Initialization, and Relaxation
 0:04:42
0:04:42
Network problems. Part 1. Shortest path.
 0:07:34
0:07:34
Dijkstra's Shortest Path Algorithm
 0:19:20
0:19:20
G-35. Print Shortest Path - Dijkstra's Algorithm
 0:09:57
0:09:57
Shortest/Longest path on a Directed Acyclic Graph (DAG) | Graph Theory
 0:10:34
0:10:34
Dijkstra's Shortest Path Algorithm Visually Explained | How it Works | With Examples
 0:17:12
0:17:12
4.4 Bellman Ford Algorithm - Single Source Shortest Path - Dynamic Programming
 0:00:12
0:00:12
Shortest Path with Dijkstra’s Algorithm | Graph Algorithms Explained 🚀🔍 | #vilearnx
Комментарии