filmov
tv
Rolling without slipping, Rigid body, IB Physics
Показать описание
Rolling motion refers to the movement of an object where it simultaneously undergoes translational (linear) motion and rotational motion. In this type of motion, the object moves forward or backward (translationally) while also rotating about its own axis. Wheels, balls, cylinders, etc
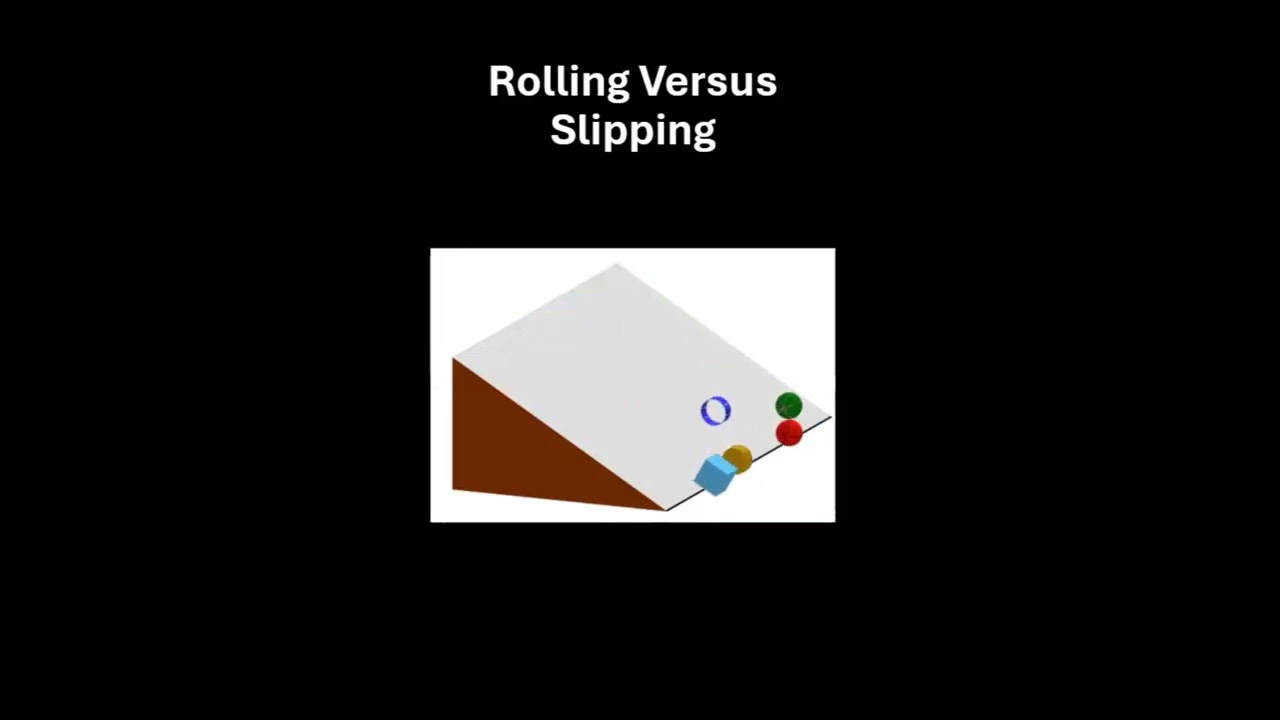
Slipping occurs in rolling motion when the point of contact between a rolling object and the surface does not have zero velocity relative to the surface, leading to a lack of traction and potential loss of control or efficiency in motion.
Rolling without slipping denotes a scenario where the point of contact between the object and the surface remains motionless, maintaining zero velocity relative to the surface at that moment. This condition ensures that the object rolls smoothly without sliding, crucial for maintaining traction and efficient motion, commonly observed in scenarios like a wheel or ball moving smoothly along a surface.
For an object to roll without slipping, the rotational velocity must be directly proportional to the translational velocity, maintaining a constant relationship based on the object's geometry. Additionally, the force of static friction between the object and the surface must prevent any relative sliding motion.
Equations related to rolling without slipping include:
1. Relationship between linear and angular velocity: v=r⋅ω, where v is linear velocity, r is the radius of the rolling object, and ω is angular velocity.
2. Kinetic energy of rolling without slipping: KE=1/2mv2+1/2Iω2, combining translational kinetic energy with rotational kinetic energy ).
3. Torque and angular acceleration τ=I⋅α, where τ is torque, I is the moment of inertia, and α is angular acceleration, demonstrating how torque affects rotational motion.
If the wheel is not slipping with respect to the ground, then the point is, at that instant, wheel is at rest relative to the ground. We call this type of motion “rolling without slipping”; the point on the rotating object that is in contact with the ground is instantaneously at rest relative to the ground
Slipping occurs in rolling motion when the point of contact between a rolling object and the surface does not have zero velocity relative to the surface, leading to a lack of traction and potential loss of control or efficiency in motion.
Rolling without slipping denotes a scenario where the point of contact between the object and the surface remains motionless, maintaining zero velocity relative to the surface at that moment. This condition ensures that the object rolls smoothly without sliding, crucial for maintaining traction and efficient motion, commonly observed in scenarios like a wheel or ball moving smoothly along a surface.
For an object to roll without slipping, the rotational velocity must be directly proportional to the translational velocity, maintaining a constant relationship based on the object's geometry. Additionally, the force of static friction between the object and the surface must prevent any relative sliding motion.
Equations related to rolling without slipping include:
1. Relationship between linear and angular velocity: v=r⋅ω, where v is linear velocity, r is the radius of the rolling object, and ω is angular velocity.
2. Kinetic energy of rolling without slipping: KE=1/2mv2+1/2Iω2, combining translational kinetic energy with rotational kinetic energy ).
3. Torque and angular acceleration τ=I⋅α, where τ is torque, I is the moment of inertia, and α is angular acceleration, demonstrating how torque affects rotational motion.
If the wheel is not slipping with respect to the ground, then the point is, at that instant, wheel is at rest relative to the ground. We call this type of motion “rolling without slipping”; the point on the rotating object that is in contact with the ground is instantaneously at rest relative to the ground
 0:02:25
0:02:25
 0:08:09
0:08:09
 0:05:38
0:05:38
 0:15:00
0:15:00
 0:05:57
0:05:57
 0:04:08
0:04:08
 0:00:23
0:00:23
 0:02:43
0:02:43
 0:38:26
0:38:26
 0:02:17
0:02:17
 0:08:11
0:08:11
 0:06:58
0:06:58
 0:04:35
0:04:35
 0:25:58
0:25:58
 0:04:12
0:04:12
 0:08:55
0:08:55
 0:19:22
0:19:22
 0:15:33
0:15:33
 0:06:05
0:06:05
 0:05:43
0:05:43
 0:12:05
0:12:05
 0:03:38
0:03:38
 0:37:13
0:37:13
 0:11:47
0:11:47