filmov
tv
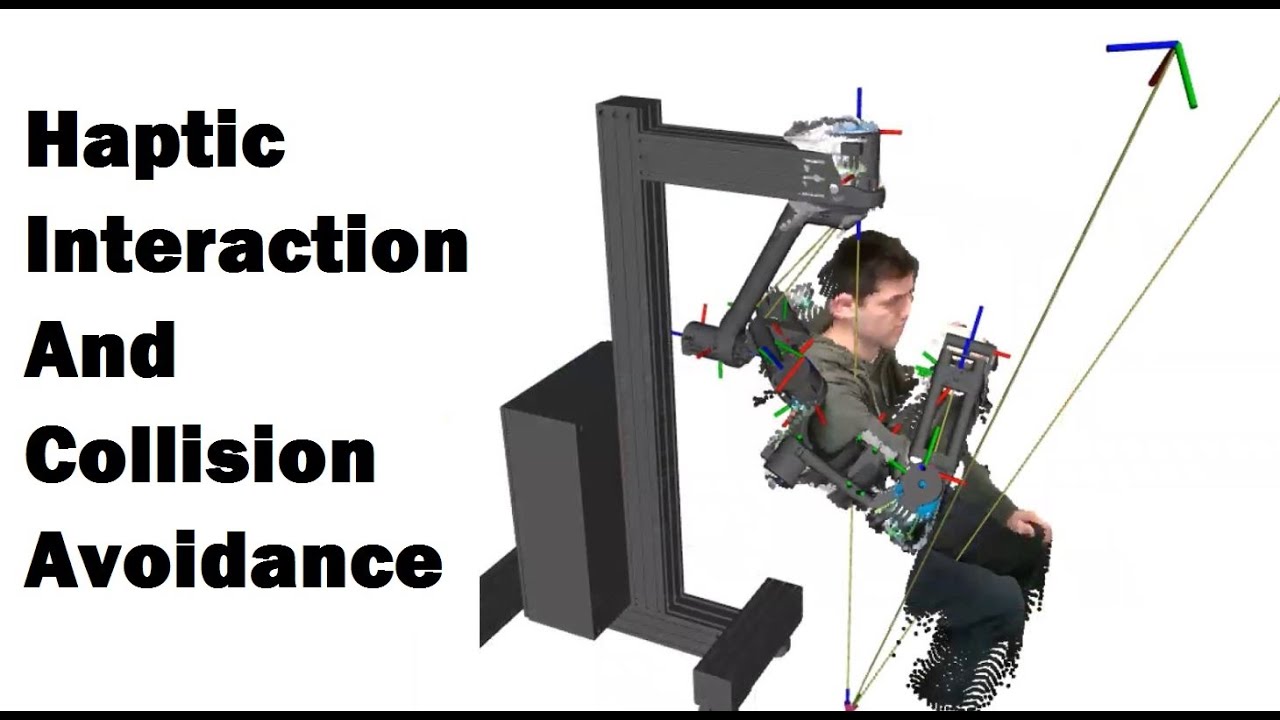
Physical Human-Robot Interaction with Haptic Surfaces
Показать описание
During robot-assisted therapy of hemiplegic patients, interaction with the patient must be intrinsically safe. Straight-forward collision avoidance solutions can provide this safety requirement with conservative margins. These margins heavily reduce the robot's workspace and make interaction with the patient's unguided body parts impossible. However, interaction with the own body is highly beneficial from a therapeutic point of view. We tackle this problem by combining haptic rendering techniques with classical computer vision methods. Our proposed solution consists of a pipeline that builds collision objects from point clouds in real-time and a controller that renders haptic interaction. The raw sensor data is processed to overcome noise and occlusion problems. Our proposed approach is validated on the 6 DoF exoskeleton ANYexo for direct impacts, sliding scenarios, and dynamic collision surfaces. The results show that this method has the potential to successfully prevent collisions and allow haptic interaction for highly dynamic environments. We believe that this work significantly adds to the usability of current exoskeletons by enabling virtual haptic interaction with the patient's body parts in human-robot therapy.
This work was presented at IROS 2020. The research was supported in part by the Swiss National Science Foundation through the National Centre of Competence in Research Robotics (NCCR Robotics) and Innosuisse, the Swiss Innovation Agency.
M. Sommerhalder, Y. Zimmermann and R. Riener are with Sensory-Motor Systems Lab, ETH Zurich, Switzerland.
Y. Zimmermann, B. Cizmeci and M. Hutter are with Robotic Systems Lab, ETH Zurich, Switzerland.
R. Riener is additionally with Spinal Cord Injury Center, University Hospital Balgrist, Zurich, Switzerland.
R. Riener and M. Hutter contributed equally to the project's lead.
 0:12:58
0:12:58
 0:43:05
0:43:05
 0:29:15
0:29:15
 0:46:07
0:46:07
 0:03:11
0:03:11
 0:51:46
0:51:46
 0:02:25
0:02:25
![[IROS 2021] Towards](https://i.ytimg.com/vi/gJPVImNKU68/hqdefault.jpg) 0:01:08
0:01:08
 0:11:18
0:11:18
 0:02:03
0:02:03
 0:02:57
0:02:57
 0:02:09
0:02:09
 0:05:28
0:05:28
 1:06:47
1:06:47
 0:01:06
0:01:06
 0:06:39
0:06:39
 0:01:01
0:01:01
 0:04:02
0:04:02
 0:01:48
0:01:48
 0:02:31
0:02:31
 0:00:41
0:00:41
 0:01:49
0:01:49
 0:55:15
0:55:15
 0:01:08
0:01:08