filmov
tv
Thinking While Moving: Deep Reinforcement Learning with Concurrent Control

Показать описание
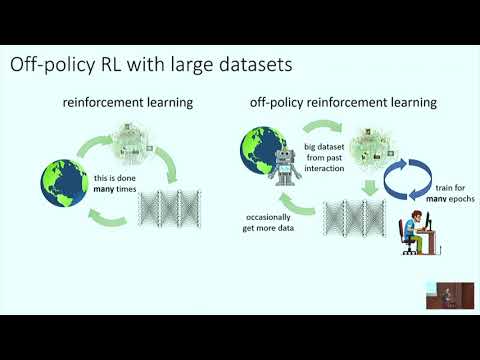
Classic RL "stops" the world whenever the Agent computes a new action. This paper considers a more realistic scenario where the agent is thinking about the next action to take while still performing the last action. This results in a fascinating way of reformulating Q-learning in continuous time, then introducing concurrency and finally going back to discrete time.
Abstract:
We study reinforcement learning in settings where sampling an action from the policy must be done concurrently with the time evolution of the controlled system, such as when a robot must decide on the next action while still performing the previous action. Much like a person or an animal, the robot must think and move at the same time, deciding on its next action before the previous one has completed. In order to develop an algorithmic framework for such concurrent control problems, we start with a continuous-time formulation of the Bellman equations, and then discretize them in a way that is aware of system delays. We instantiate this new class of approximate dynamic programming methods via a simple architectural extension to existing value-based deep reinforcement learning algorithms. We evaluate our methods on simulated benchmark tasks and a large-scale robotic grasping task where the robot must "think while moving".
Authors: Ted Xiao, Eric Jang, Dmitry Kalashnikov, Sergey Levine, Julian Ibarz, Karol Hausman, Alexander Herzog
Links:
Abstract:
We study reinforcement learning in settings where sampling an action from the policy must be done concurrently with the time evolution of the controlled system, such as when a robot must decide on the next action while still performing the previous action. Much like a person or an animal, the robot must think and move at the same time, deciding on its next action before the previous one has completed. In order to develop an algorithmic framework for such concurrent control problems, we start with a continuous-time formulation of the Bellman equations, and then discretize them in a way that is aware of system delays. We instantiate this new class of approximate dynamic programming methods via a simple architectural extension to existing value-based deep reinforcement learning algorithms. We evaluate our methods on simulated benchmark tasks and a large-scale robotic grasping task where the robot must "think while moving".
Authors: Ted Xiao, Eric Jang, Dmitry Kalashnikov, Sergey Levine, Julian Ibarz, Karol Hausman, Alexander Herzog
Links:
 0:29:41
0:29:41
Thinking While Moving: Deep Reinforcement Learning with Concurrent Control
 0:04:41
0:04:41
Presentation of Thinking While Moving: Deep Reinforcement Learning with Concurrent Control
 0:02:42
0:02:42
Thinking While Moving: Deep Reinforcement Learning with Concurrent Control
 0:08:40
0:08:40
AI Learns to Walk (deep reinforcement learning)
 0:49:24
0:49:24
Joelle Pineau: Reproducibility, Reusability, and Robustness in Deep Reinforcement Learning ICLR 2018
 1:11:04
1:11:04
Speeding up Deep Reinforcement Learning via Transfer and Multitask Learning
 1:06:34
1:06:34
Physics-Informed Deep Reinforcement Learning for Power System Optimization and Control
 0:36:53
0:36:53
Raia Hadsell - Deep Reinforcement Learning & Real World Challenges
 1:27:30
1:27:30
MIT 6.S094: Deep Reinforcement Learning for Motion Planning
 0:01:51
0:01:51
Google's DeepMind AI Just Taught Itself To Walk
 0:57:55
0:57:55
MIT 6.S094: Deep Reinforcement Learning
 0:51:21
0:51:21
Season 1 Ep 1 Foundations of Deep Reinforcement Learning with Pieter Abbeel
 0:36:26
0:36:26
A friendly introduction to deep reinforcement learning, Q-networks and policy gradients
 0:22:52
0:22:52
Tim Lillicrap - Data efficient deep reinforcement learning for continuous control
 1:00:19
1:00:19
MIT 6.S191: Reinforcement Learning
 1:06:39
1:06:39
773: Deep Reinforcement Learning for Maximizing Profits — with Prof. Barrett Thomas
 0:08:14
0:08:14
Reinforcement Learning: AlphaGo
 0:12:00
0:12:00
AI Learns to Use Stairs (deep reinforcement learning)
 0:46:23
0:46:23
Deep Reinforcement Learning in the Real World -Sergey Levine
 1:29:52
1:29:52
DeepMind x UCL RL Lecture Series - Introduction to Reinforcement Learning [1/13]
 0:11:28
0:11:28
Reinforcement Learning: Crash Course AI #9
 1:37:21
1:37:21
Deep Reinforcement Learning
 1:19:25
1:19:25
SDS 551: Deep Reinforcement Learning — with Wah Loon Keng
 0:40:47
0:40:47
TensorFlow and deep reinforcement learning, without a PhD (Google I/O '18)
Комментарии