filmov
tv
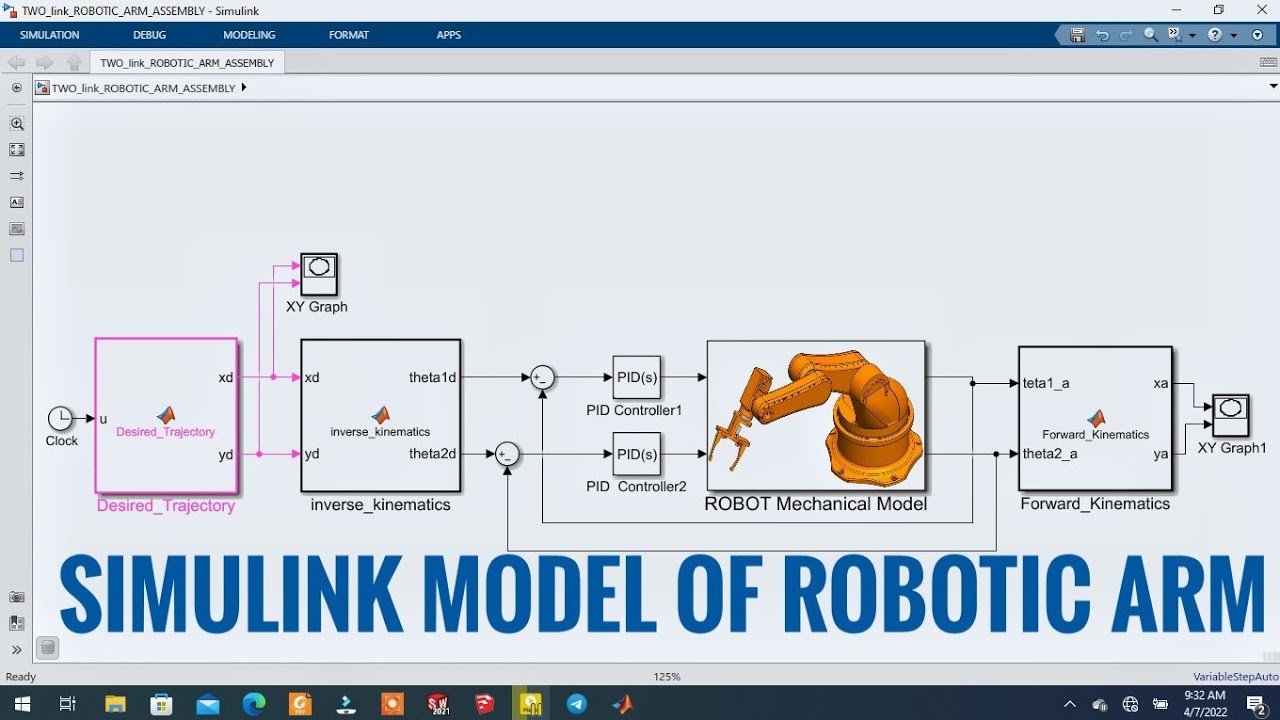
The Full Modeling and simulation of a Robotic Arm using MATLAB simscape multibody and Solidworks
Показать описание
hello, folks welcome to MT Engineering hear in this video we came up with an interesting mechatronics project that is 2 links planar robotic arm. so to do this first we will model our robot using Solidworks and we export the model into Matlab using Simscape multibody link so that we can build the control algorithm and simulate the real behavior of the robot both graphically and using mechanics explorer. so this video will help you understand the modeling and simulation of robots using Solidworks, Matlab, and Simulink. and it doesn't need in-depth knowledge of Matlab to understand what we are going to do. If you are new to Matlab it is the perfect opportunity for you.
and by the way, don't forget to subscribe like, and share this video so you will get notified every time we release amazing videos like this one.
the link for the robot gripper
Timestamps
00:0:00 - 00:01:00 Introduction to the project.
00:01:00 - 00:24:55 modeling the robot using Solidworks.
00:24:56 - 00:27:29 a brief overview of the control algorithm of the project.
00:27:30 - 1:04:06 modeling and simulating the robot using Simscape multibody
and by the way, don't forget to subscribe like, and share this video so you will get notified every time we release amazing videos like this one.
the link for the robot gripper
Timestamps
00:0:00 - 00:01:00 Introduction to the project.
00:01:00 - 00:24:55 modeling the robot using Solidworks.
00:24:56 - 00:27:29 a brief overview of the control algorithm of the project.
00:27:30 - 1:04:06 modeling and simulating the robot using Simscape multibody
 1:04:07
1:04:07
The Full Modeling and simulation of a Robotic Arm using MATLAB simscape multibody and Solidworks
 0:33:41
0:33:41
Intro to Modeling and Simulation - Lecture
 0:02:43
0:02:43
Models and Simulations in Engineering
 0:30:54
0:30:54
Lecture 01- Introduction to Simulation
 0:35:01
0:35:01
Introduction to Simulation: System Modeling and Simulation
 0:01:31
0:01:31
Course Spotlight: Modeling and Simulation of Complex Systems
 0:31:11
0:31:11
Lecture 05 - Simulation examples
 0:23:22
0:23:22
Simulation Modeling Part 1 | Monte Carlo and Inventory Analysis Applications
 0:11:12
0:11:12
RFS - Real Flight Simulator - Paris To London || Full Flight || Boeing 777F || DHL Cargo Delivery
 0:02:09
0:02:09
Model-Based Design with MATLAB and Simulink
 0:03:38
0:03:38
What Is Monte Carlo Simulation?
 0:40:04
0:40:04
Introduction to Model Based Design Modeling and Simulation with Simulink
 0:33:40
0:33:40
Lecture 37- Introduction to Monte Carlo Simulation
 0:37:58
0:37:58
Modeling, Simulation, and Flight Control Design of an Aircraft with Simulink
 0:01:08
0:01:08
Learn Molecular Modeling for Materials Science with Schrödinger Online Courses
 0:09:07
0:09:07
Solidworks Simulation tutorial | Steel Structure Simulation in Solidworks
 0:31:54
0:31:54
Pumas: Pharmaceutical Modeling and Simulation | Chris Rackauckas | JuliaCon 2018
 0:24:29
0:24:29
Model Based Systems Engineering
 0:17:10
0:17:10
Modeling and Simulation of Advanced Amateur Rockets
 0:00:33
0:00:33
India Ball Animation (dynamic paint for water simulation)
 0:07:06
0:07:06
Simulation Modeling | Tutorial #9 | Inventory Systems
 0:20:16
0:20:16
Process Modeling 101 for Manufacturing Simulation | Assembly Management in Process Modeling
 0:11:52
0:11:52
Self-Driving AI Car Simulation in Python
 0:22:32
0:22:32
Modeling of Wind Turbine in Matlab/Simulink
Комментарии