filmov
tv
System Dynamics and Control: Module 13a - Introduction to Control
Показать описание
Introduction to the idea of control. Discussion of the differences between open-loop and closed-loop control.
Rick Hill
Control Systems
Open-loop
Closed-loop
Рекомендации по теме
1:09:04
System Dynamics and Control: Module 4 - Modeling Mechanical Systems
0:12:57
System Dynamics and Control: Module 13a - Introduction to Control
0:06:22
System Dynamics and Control: Module 16a - Intro to Steady-State Error
0:25:29
System Dynamics and Control: Module 13d - Introductory Control Design Example
0:13:15
System Dynamics and Control: Module 16d - System Type
0:14:12
System Dynamics and Control: Module 19a - Concept of Frequency Response
0:11:14
System Dynamics and Control: Module 19b - Introduction to Bode Diagrams
0:15:23
System Dynamics and Control: Module 14d - Intro to PID, PD and PI control
1:46:32
Cross Roads #50: 'The Many Faces of Emergence' Dr Fernando Rosas
0:11:43
System Dynamics and Control: Module 27a - Introduction to State-Space Modeling
0:14:17
System Dynamics and Control: Module 26c - Design without a Model
0:12:43
System Dynamics and Control: Module 22d - Designing for Robustness
0:38:35
System Dynamics and Control: Module 14b - Design Example
0:20:41
System Dynamics and Control: Module 22b - Design with Frequency Response
0:18:53
System Dynamics and Control: Module 26d - Controller Implementation
1:14:38
System Dynamics and Control: Module 13 - Introduction to Control, Block Diagrams
0:04:46
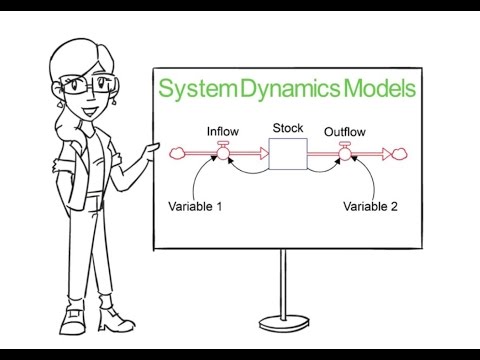
Introduction to System Dynamics Models
0:13:56
System Dynamics and Control: Module 26a - Sensor/Actuator Dynamics
0:11:04
System Dynamics and Control: Module 22c - Other Considerations for Control Design
0:09:32
System Dynamics and Control: Module 16c - SS Error Example (PI Control)
0:05:45
System Dynamics and Control: Module 17a - Introduction to Root Locus
0:24:08
System Dynamics and Control: Module 18b - Design with Root Locus Example
0:20:30
Systems Dynamics and Control: Module 2 - Introduction to Modeling
0:19:47
System Dynamics and Control: Module 27b - Choosing State Variables

 1:09:04
1:09:04
 0:12:57
0:12:57
 0:06:22
0:06:22
 0:25:29
0:25:29
 0:13:15
0:13:15
 0:14:12
0:14:12
 0:11:14
0:11:14
 0:15:23
0:15:23
 1:46:32
1:46:32
 0:11:43
0:11:43
 0:14:17
0:14:17
 0:12:43
0:12:43
 0:38:35
0:38:35
 0:20:41
0:20:41
 0:18:53
0:18:53
 1:14:38
1:14:38
 0:04:46
0:04:46
 0:13:56
0:13:56
 0:11:04
0:11:04
 0:09:32
0:09:32
 0:05:45
0:05:45
 0:24:08
0:24:08
 0:20:30
0:20:30
 0:19:47
0:19:47