filmov
tv
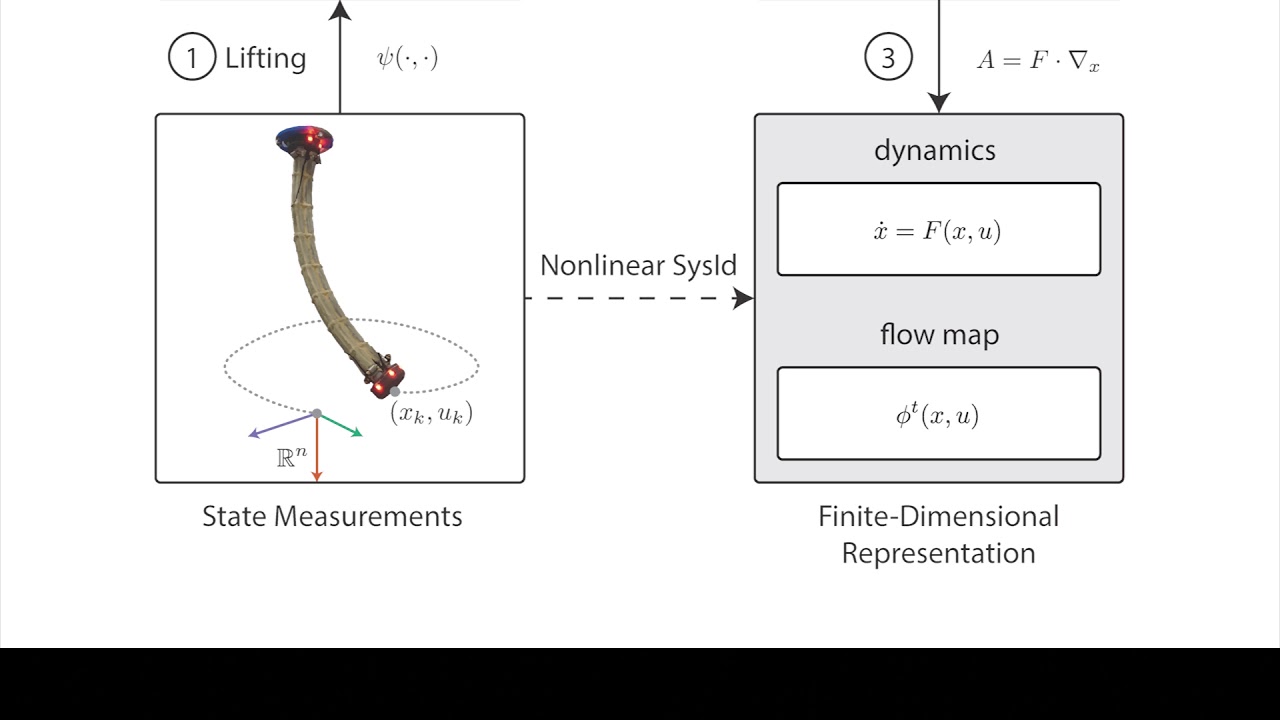
Nonlinear System Identification of Soft Robot Dynamics Using Koopman Operator Theory - ICRA 2019
Показать описание
This is the accompanying video for our submission to ICRA 2019.
For more information, check out the preprint of our paper here:
For more information, check out the preprint of our paper here:
 0:02:29
0:02:29
 0:01:39
0:01:39
 0:12:18
0:12:18
 0:20:12
0:20:12
 0:13:19
0:13:19
 1:56:48
1:56:48
 0:19:35
0:19:35
 1:02:04
1:02:04
 0:02:48
0:02:48
 0:00:24
0:00:24
 0:02:13
0:02:13
 0:09:41
0:09:41
 0:55:49
0:55:49
 0:16:42
0:16:42
 0:01:49
0:01:49
 0:00:28
0:00:28
 0:00:48
0:00:48
 0:16:35
0:16:35
 0:12:02
0:12:02
 0:12:13
0:12:13
 0:53:23
0:53:23
 0:06:09
0:06:09
 0:10:25
0:10:25
 0:10:04
0:10:04