filmov
tv
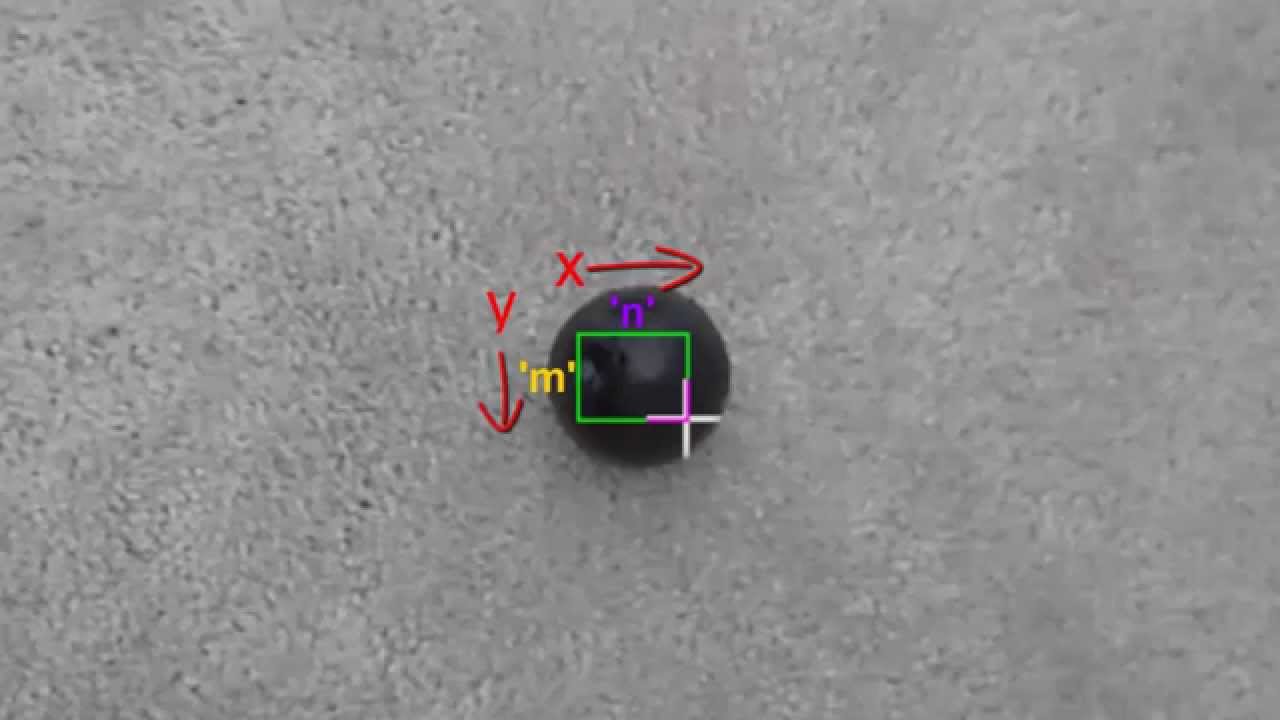
OpenCV Tutorial: Adding an Automatic Colour Filter for Object Tracking
Показать описание
Found this video useful? Donations are very much appreciated, thank you.
BTC: 18Hysn4veDCCkhKtkqBiigJ8HfhjkzWDta
Ethereum: 0x97267a8d15d35012FaA9B07be4ac5Ff935876E10
In this video we add code to automatically tune an HSV filter from a user selected region.
BTC: 18Hysn4veDCCkhKtkqBiigJ8HfhjkzWDta
Ethereum: 0x97267a8d15d35012FaA9B07be4ac5Ff935876E10
In this video we add code to automatically tune an HSV filter from a user selected region.
 0:11:20
0:11:20
OpenCV Tutorial: Adding an Automatic Colour Filter for Object Tracking
 3:41:42
3:41:42
OpenCV Course - Full Tutorial with Python
 0:00:44
0:00:44
A demo of agriculture robot. Robotic arm + Raspberry PI + Python + OpenCV.
 0:02:42
0:02:42
How to Install OpenCV in Visual Studio (2023)
 0:25:17
0:25:17
Auto-Measuring with OpenCV + Python - Try It Yourself
 0:08:36
0:08:36
Python OpenCV Tutorial To Capture Images From Webcam Full Project For Beginners
 0:16:07
0:16:07
Automated Photo Background replacement and mask refinement using openCV
 0:15:01
0:15:01
How to make advanced image recognition bots using python
 0:12:42
0:12:42
PyAutoGUI - Locate anything on your screen | Simple Pyautogui project
 0:05:31
0:05:31
Add Text on Image using OpenCV | Add text on Video | Machine Learning | Data Magic
 1:46:53
1:46:53
OpenCV Tutorial for Absolute Beginners | OpenCV Python Tutorial | Great Learning
 0:06:38
0:06:38
Image Masking using OpenCV l Mask Image | Computer Vision | Data Magic
 0:00:18
0:00:18
OPENCV DETECTING CIRCLES
 0:04:18
0:04:18
How to add text to video in Opencv Python tutorial
 0:00:54
0:00:54
Multiple Object Tracking Using OpenCV
 0:12:55
0:12:55
Image Features & Alignment with OpenCV
 0:25:03
0:25:03
Python ANPR with OpenCV and EasyOCR in 25 Minutes | Automatic Number Plate Recognition Tutorial
 0:02:01
0:02:01
How to make a game bot (FOR BEGINNERS) ANY GAME!!!
 0:00:34
0:00:34
Senior Programmers vs Junior Developers #shorts
 0:00:59
0:00:59
😲 OPENCV FACE DETECTION IN GOOGLE COLAB - LESS THAN 1 MINUTE TUTORIAL 😲
 0:03:25
0:03:25
Image Overlay in OpenCV -part5- Opencv Tutorials
 0:15:16
0:15:16
Python Automatic Attendance System using opencv and database , Python opencv projects python open cv
 0:14:52
0:14:52
OpenCV Python Tutorial #1 - Introduction & Images
 0:01:09
0:01:09
AI Generates 3D Model From Single Photo (Google Colab)
Комментарии