filmov
tv
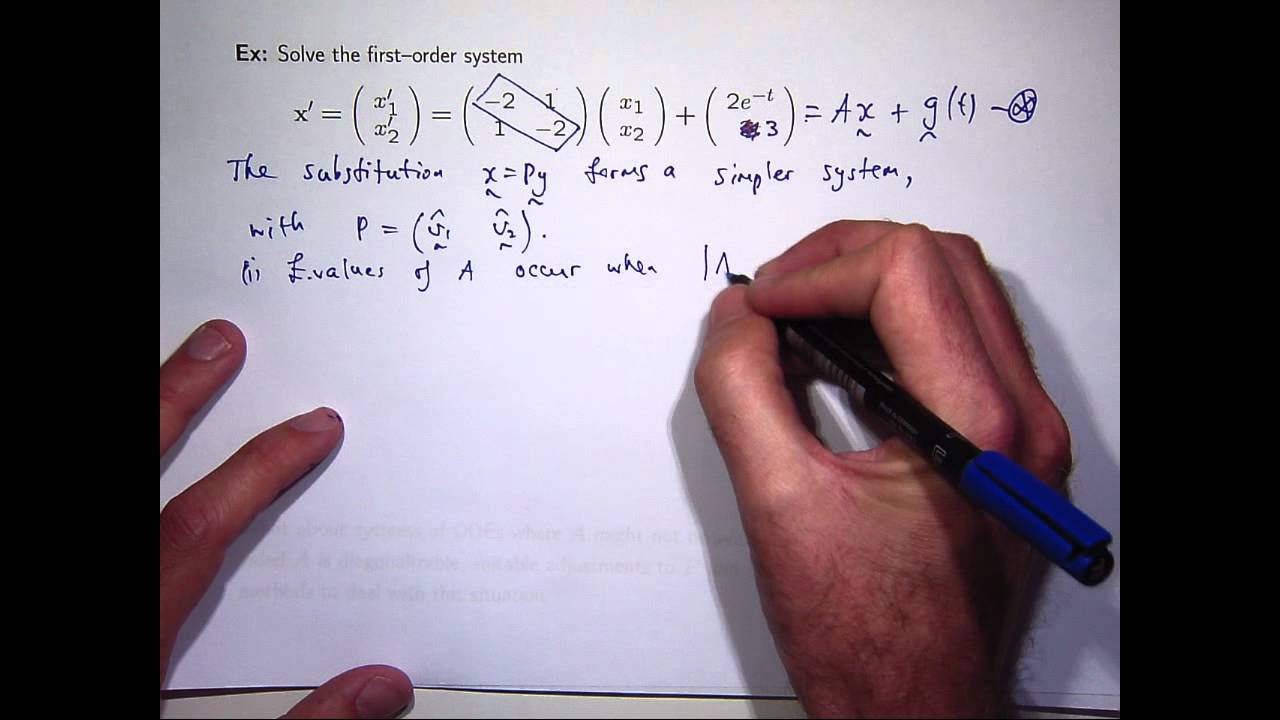
Matrix methods for systems of differential equations
Показать описание
I show how to use matrix methods to solve first order systems of differential equations. The ideas involve diagonalization and basic linear ODEs.
The example shown involves symmetric matrices.
The example shown involves symmetric matrices.
 0:09:23
0:09:23
Simultaneous Equations Matrix Method : ExamSolutions
 0:18:40
0:18:40
Gaussian Elimination & Row Echelon Form
 0:13:37
0:13:37
Solving System of Linear Equations: Matrix Inversion
 0:08:28
0:08:28
Systems of linear first-order odes | Lecture 39 | Differential Equations for Engineers
 0:04:04
0:04:04
Matrices - System of Linear Equations (Part 1) | Don't Memorise
 0:06:31
0:06:31
Solving Matrix Equations
 0:24:58
0:24:58
Matrix Systems of Differential Equations
 0:10:51
0:10:51
Gauss Jordan Elimination & Reduced Row Echelon Form
 0:11:19
0:11:19
Computational Finance - Video 10 - Gauss-Jacobi method
 0:12:47
0:12:47
Matrix inversion method
 0:05:23
0:05:23
Solve by Matrix Method | Matrix Method | Matrices | MindYourChoices @mindyourchoices
 0:24:26
0:24:26
Matrix methods for systems of differential equations
 0:10:36
0:10:36
Manipulating Matrices: Elementary Row Operations and Gauss-Jordan Elimination
 0:15:03
0:15:03
Cramer's Rule - 3x3 Linear System
 0:18:06
0:18:06
How to use the MATRIX method to solve SIMULTANEOUS equations #3x3
 0:08:23
0:08:23
Solve a System of Linear Equations Using LU Decomposition
 0:50:19
0:50:19
Solving Linear Systems in three Variables using Matrix Methods Practice Test Full Solutions
 0:07:11
0:07:11
Matrix Method to Calculate Circular Convolution
 0:21:04
0:21:04
Thomas Algorithm | Solution for tri diagonal system of equations|Tri-Diagonal Matrix 4x4|Mathspedia|
 0:10:40
0:10:40
Matrix Class 12 | Solve By Row Equivalent Matrix Method @mindyourchoices
 0:19:17
0:19:17
Matrix inverse method || matrix inverse 3x3
 0:21:03
0:21:03
🟢06c - Jacobi Iteration Method in Matrix Form: Example 1
 0:06:41
0:06:41
Solution of system of linear equation using matrix method interesting example(PART-3)
 0:14:30
0:14:30
SOLVING SIMULTANEOUS EQUATION OF 3 UNKNOWN BY INVERSE MATRIX METHOD
Комментарии