filmov
tv
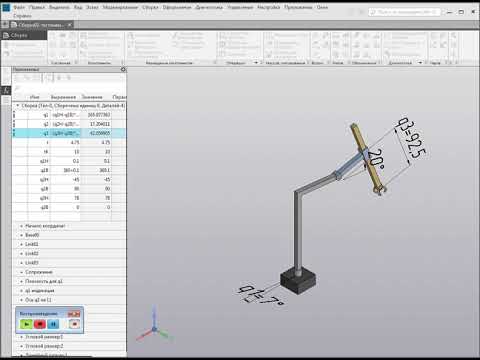
test003 Анимация в Компасе через переменную

Показать описание
Пробный ролик. Лаба02, вар.05.
Алгоритм изменения обопщённых координат механизма по кубическому сплайну:
qi(t) = 2*(qiH-qiB)*(t/tK)^3+3*(qiB-qiH)*(t/tK)^2+qiH
qH - нижнее, начальное
qB - верхнее, конечное
tK - конечное
Алгоритм изменения обопщённых координат механизма по кубическому сплайну:
qi(t) = 2*(qiH-qiB)*(t/tK)^3+3*(qiB-qiH)*(t/tK)^2+qiH
qH - нижнее, начальное
qB - верхнее, конечное
tK - конечное
 0:00:16
0:00:16
 0:00:11
0:00:11
 0:00:07
0:00:07
 0:06:50
0:06:50
 0:00:16
0:00:16
 0:01:59
0:01:59
 0:00:33
0:00:33
 0:05:54
0:05:54
 0:03:17
0:03:17
 0:02:07
0:02:07
![[Android Code] Google](https://i.ytimg.com/vi/TaPvjuDPfE0/hqdefault.jpg) 0:00:50
0:00:50