filmov
tv
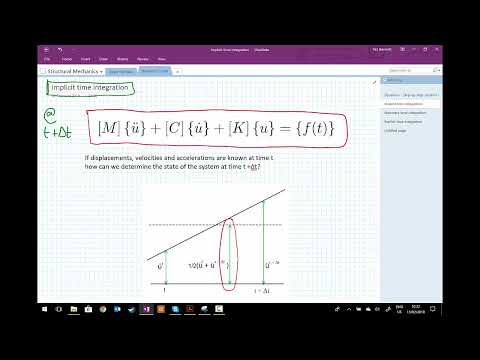
Dynamics - Implicit Time Integration

Показать описание
Derivation of the Newmark implicit time integration scheme.
 0:17:33
0:17:33
Dynamics - Implicit Time Integration
 0:07:03
0:07:03
Implicit and Explicit Time Integration — Lesson 2
 0:19:57
0:19:57
Introduction to explicit and implicit time-integration
 0:17:42
0:17:42
FEA 21: Transient Implicit
 0:21:22
0:21:22
Implicit and Explicit Analysis in FEA, Part - 01 (Differences & Application)
 0:41:34
0:41:34
NFX Technical Webinar: Nonlinear explicit/implicit dynamic analysis
 0:04:30
0:04:30
Review of explicit and implicit time integration schemes
 0:08:39
0:08:39
Gray Scott equations: implicit time integration
 1:04:52
1:04:52
webinar Unlocking the Potentials of Abaqus for Nonlinear FEA Part 2
 0:07:14
0:07:14
Implicit vs Explicit Scheme
 0:23:28
0:23:28
Deriving Forward Euler and Backward/Implicit Euler Integration Schemes for Differential Equations
 0:10:58
0:10:58
W05M04 Numerical Methods based on Variation of Acceleration Newmark's Method
 0:41:34
0:41:34
NFX Technical Webinar: Nonlinear explicit implicit dynamic analysis
 0:14:46
0:14:46
Implicit-explicit time integration of nonlinear fractional differential equations, Dr. Jorge Suzuki
 0:11:37
0:11:37
Explicit and Implicit Time Discretization
 0:24:16
0:24:16
4-2: Dynamic FEA (Newmark-beta Implicit Integration)
 0:01:19
0:01:19
What are Implicit and Explicit FEA Analysis
 0:01:01
0:01:01
Explicit and Implicit Schemes in CFD #ComputationalFluidDynamics #FluidMechanics #CodingForCFD
 0:05:46
0:05:46
Implict vs Explicit Analysis | What is the difference between Implicit & Explicit Analysis | GRS
 0:05:02
0:05:02
How to Solve Time Derivatives (Chain Rule, Implicit Differentiation, dr/dθ)
 0:09:51
0:09:51
Ls-Dyna Implicit Training: Lecture 1: Implicit Versus Explicit
 1:09:20
1:09:20
DYNAmore Express: Tips and tricks for successful implicit analysis with LS-DYNA
 0:08:46
0:08:46
Review of explicit vs implicit schemes
 0:00:04
0:00:04
Explicit and Implicit Scheme||CFD||2021
Комментарии