filmov
tv
FLProg. П-регулятор для мобильного робота.

Показать описание
Рассматривается возможный вариант вычисления ошибки.
Приводится простая формула вычисления корректировки скорости и её применение к простому дифференциальному механизму.
Проводится эмпирическая настройка пропорционального коэффициента регулирования и максимальной скорости робота с этим коэффициентом.
Приводится простая формула вычисления корректировки скорости и её применение к простому дифференциальному механизму.
Проводится эмпирическая настройка пропорционального коэффициента регулирования и максимальной скорости робота с этим коэффициентом.
 0:15:53
0:15:53
FLProg. П-регулятор для мобильного робота.
 0:00:20
0:00:20
Робот с П-регулятором
 0:09:03
0:09:03
FLProg. Простой способ подсчета ошибки для робота гонщика....
 0:00:20
0:00:20
Пропорциональный регулятор версия 2.0. Ардуино робототехника. Кр=0.5...
 0:26:26
0:26:26
FLProg Движение робота по линии. Вебинар Zoom.
 0:18:26
0:18:26
FLProg. Программа робота на Attiny
 0:26:15
0:26:15
напишем программу! FLProg! учимся вместе программированию! изменим частоту шима ардуино !...
 0:18:38
0:18:38
PID-регулятор. Коэффициенты и их настройка на простейшем примере....
 0:09:54
0:09:54
FLProg 15. Управление выходами через Bluetooth
 0:08:55
0:08:55
FLProg 10. Регулировка скорости коллекторного двигателя.
 0:23:53
0:23:53
Решение задач на управление движением мобильного робота, 23.01.2020...
 0:12:07
0:12:07
Регулятор на ардуино, борьба с наводками датчика Холла
 0:00:44
0:00:44
Движение робота по линии
 0:08:41
0:08:41
СОЗДАЕМ РОБОТА ДРУГА#2 (Движение робота)
 0:00:22
0:00:22
VEX ClawBot & Arduino Mega with PID. 2 sensors
 0:20:45
0:20:45
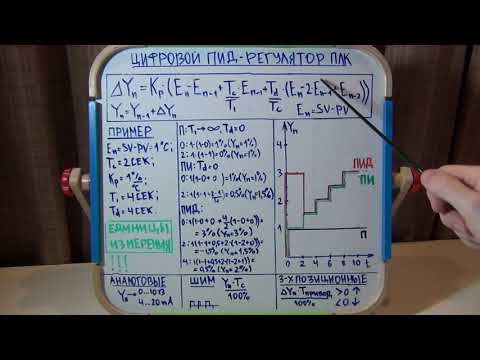
Цифровой ПИД регулятор для ПЛК. Подробный разбор
 0:33:57
0:33:57
📝Заметки 'Делаю DC-DC преобразователь напряжения 2.4кВт PFC Arduino' для солнечных панеле...
 0:01:39
0:01:39
Ардуино-ведро на колёсах. Дети программируют в FLProg
 0:33:48
0:33:48
34. Диммер на 220в для Умного Дома - Часть2. Большой тест на ~4000 Ватт...
 0:22:26
0:22:26
Проверка наличия интернета с помощью ESP8266 01 в FLprog
 0:18:31
0:18:31
Насос с PWM управлением от Arduino с телефона по Bluetooth. Схема и программа...
 0:30:55
0:30:55
Подбор компонентов системы управления. Вебинар Zoom.
 0:10:52
0:10:52
FLProg и Esp8266. Подключение дополнительных программных блоков....
 0:06:07
0:06:07
Знакомство с Digispark ATtiny85. 'Arduino для чайников'
Комментарии