filmov
tv
Kinematical smoothing of rotary axis near singularity point

Показать описание
L. GRANDGUILLAUME, S. LAVERNHE, C. TOURNIER
A new method to modify the tool axis orientation by going through the singularity point while respecting maximum velocity, acceleration and jerk of the rotary axis.
A new method to modify the tool axis orientation by going through the singularity point while respecting maximum velocity, acceleration and jerk of the rotary axis.
 0:00:39
0:00:39
Kinematical smoothing of rotary axis near singularity point
 0:01:28
0:01:28
Experiment for basics S-Curve motion control
 0:05:32
0:05:32
Rotation Interpolation Trajectory Planning
 0:00:12
0:00:12
Hybrid Kinematic Control for Rigid Body Pose Stabilization using Dual Quaternions
 0:01:09
0:01:09
Smoothing Camera Poses on the Manifold of Dual Quaternions
 0:01:34
0:01:34
INVK - An Inverse Kinematics Library using Quaternions
 0:00:39
0:00:39
PID with Euler Angles and Quaternion
 0:00:15
0:00:15
2013 Leadwell V50i
 0:01:38
0:01:38
An IMU-to-Body Alignment Method Applied to Human Gait Analysis
 0:00:41
0:00:41
FANUC Workpiece Setting Error Compensation in TWP
 0:09:44
0:09:44
Circular-Base-Stewart-Platform, Part 8, The Platform
 0:00:43
0:00:43
Ultra-precision machining
 0:00:30
0:00:30
Four wheel steering simulation - 0 degree linear to rotation - module control - s-curve profile
 0:00:41
0:00:41
Another usage of G43.4
 0:00:30
0:00:30
Four wheel steering simulation - 0 degree linear to rotation - body control - s-curve profile
 0:00:29
0:00:29
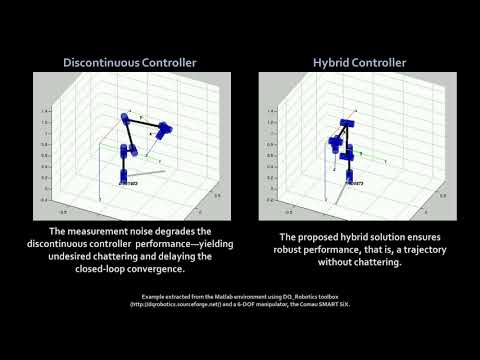
Hybrid dual quaternion based controller - Chattering phenomenon comparision
 0:00:30
0:00:30
PID Trapezoidal Profile
 0:00:39
0:00:39
Jerk Limitation
 0:00:08
0:00:08
Linear VS Easing Abuse - Moon Animator Comparison
 0:00:09
0:00:09
3rd video - Quatrebot final setup, with two servos - Testing first joint control system
 0:00:36
0:00:36
KMotionCNC Auto Tool Length Measure
 0:03:00
0:03:00
Efficient Computation of Constrained Parameterizations on Parallel Platforms
 0:18:10
0:18:10
Tips FEA 2DOF Catia v5 Forced Vibration Undamped
 0:00:34
0:00:34
Dual Quaternion Multibody Spacecraft-Mounted Robotic System Pose-Tracking Maneuver
Комментарии