filmov
tv
ERROR en ESTADO ESTACIONARIO ✅ [Sistemas de Control]

Показать описание
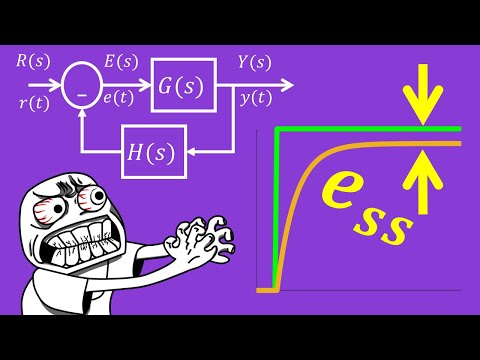
El error de estado estable se define como la diferencia entre la entrada (referencia) y la salida de un sistema en el límite cuando el tiempo llega al infinito (es decir, cuando la respuesta ha alcanzado el estado estable). El error de estado estable dependerá del tipo de entrada (escalón, rampa, parábola, etc.) así como del tipo de sistema (0, I o II).
Nota: El análisis de errores en estado estable solo es útil para sistemas estables. Siempre debe verificar la estabilidad del sistema antes de realizar un análisis de errores de estado estable. Muchas de las técnicas que presentamos darán una respuesta incluso si el error no alcanza un valor de estado estable finito.
Podemos clasificar el error en estado permanente para definir el mérito del sistema de control. Entre mayor sea la ganancia menos error en estado estacionario se tiene.
Constante k_p de Error Estático de “Posición”
Constante k_v de Error Estático de “Velocidad”
Constante k_a de Error Estático de “Aceleración”
⏱ MARCAS DE TIEMPO ⏱
00:00 Error en estado estable
00:47 Diagrama de Lazo Cerrado
02:26 Señal del error
04:13 Teorema del valor final
05:16 Función de transferencia de lazo abierto
06:34 Tipos de Sistemas
07:55 Ganancias de Errores en Estado Permanente
09:27 Error estático de posición
14:27 Error estático de velocidad
17:43 Error estático de Aceleración
19:51 Resumen
★SÍGUEME EN MIS OTRAS REDES★
_________________________________________________________________
Te ha servido esta información y quieres que siga aportando más contenido gratuito y de calidad. Podrias invitarme un Café y ayudarme a seguir pagando los servidores del sitio web.
__________________________________________________________________
Nota: El análisis de errores en estado estable solo es útil para sistemas estables. Siempre debe verificar la estabilidad del sistema antes de realizar un análisis de errores de estado estable. Muchas de las técnicas que presentamos darán una respuesta incluso si el error no alcanza un valor de estado estable finito.
Podemos clasificar el error en estado permanente para definir el mérito del sistema de control. Entre mayor sea la ganancia menos error en estado estacionario se tiene.
Constante k_p de Error Estático de “Posición”
Constante k_v de Error Estático de “Velocidad”
Constante k_a de Error Estático de “Aceleración”
⏱ MARCAS DE TIEMPO ⏱
00:00 Error en estado estable
00:47 Diagrama de Lazo Cerrado
02:26 Señal del error
04:13 Teorema del valor final
05:16 Función de transferencia de lazo abierto
06:34 Tipos de Sistemas
07:55 Ganancias de Errores en Estado Permanente
09:27 Error estático de posición
14:27 Error estático de velocidad
17:43 Error estático de Aceleración
19:51 Resumen
★SÍGUEME EN MIS OTRAS REDES★
_________________________________________________________________
Te ha servido esta información y quieres que siga aportando más contenido gratuito y de calidad. Podrias invitarme un Café y ayudarme a seguir pagando los servidores del sitio web.
__________________________________________________________________
 0:21:28
0:21:28
ERROR en ESTADO ESTACIONARIO ✅ [Sistemas de Control]
 0:12:33
0:12:33
ERROR en ESTADO ESTACIONARIO Ejercicios RESUELTOS
 0:08:15
0:08:15
Error en Estado Estable Para Entrada Rampa y Escalón - Tipo de Sistema de Acuerdo a S
 0:09:04
0:09:04
ERROR EN ESTADO ESTACIONARIO EJEMPLO 1 // CONTROLES AUTOMÁTICOS
 0:05:24
0:05:24
control automático - ejercicio 1 de error en estado estable
 0:12:51
0:12:51
ERROR en ESTADO ESTABLE II Ingeniería de Control II
 0:08:13
0:08:13
Error en Estado Estable Con Entrada Escalón
 0:23:43
0:23:43
Semana 11 Clase 1 Introducción al concepto de error de estado estacionario
 0:06:42
0:06:42
CA.10. Error actuante en estado estacionario.
 0:14:09
0:14:09
C1.C14.1 Error de estado estacionario
 0:21:33
0:21:33
ERROR EN ESTADO ESTABLE Parte1
 0:31:53
0:31:53
Error en Estado Estacionario con Realimentación NO Unitaria
 0:11:41
0:11:41
Respuesta transitoria y estado estacionario
 0:25:02
0:25:02
Ejemplo 1 Análisis de error en estado estacionario
 0:17:27
0:17:27
Control - 11 - Error en estado estacionario
 1:51:15
1:51:15
ERROR EN ESTADO ESTACIONARIO
 0:08:03
0:08:03
Error de estado estable para sistema de retroalimentación unitaria
 0:08:59
0:08:59
6.1 Nociones preliminares del análisis de error de estado estacionario para sistemas de control
 0:08:43
0:08:43
25 - Práctico 4b - Tipos de sistema y error en estado estacionario.
 0:36:09
0:36:09
Semana 11 Clase 2 Determinacion del error de estado estacionario
 0:29:11
0:29:11
Sistemas de Control | 6. Dudas Tarea 2.4 Error en estado estacionario (Miércoles 6 de Mayo del 2020)...
 0:03:02
0:03:02
UANL FIME IEA INGENIERIA DE CONTROL P7 ERROR DE ESTADO ESTACIONARIO
 0:52:29
0:52:29
Error de estado estacionario definición y ejemplos
 0:47:56
0:47:56
Error en estado estacionario. Características de un sistema de control.
Комментарии