filmov
tv
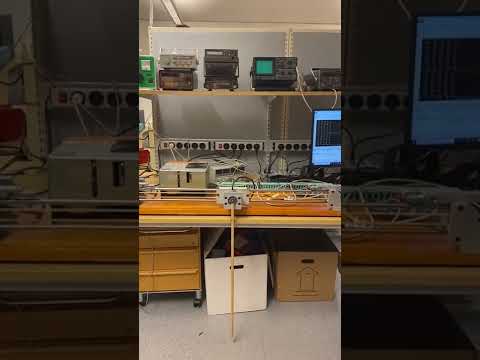
LQR controller implementation on Arduino

Показать описание
This video shows the implementation of the Linear Quadratic Regulator controller on an Arduino based Inverted Pendulum Robot. The programming and controller design was done in Arduino IDE and MATLAB. The green and black tapes describes the control region #Arduino #LQR #MATLAB #Invertedpendulum #Control
 0:00:45
0:00:45
LQR controller implementation on Arduino
 0:00:47
0:00:47
LQR pendulem arduino implementation
 0:01:22
0:01:22
LQR control of an inverted pendulum using Arduino Mega 2560 - Odwrócone wahadło
 0:03:00
0:03:00
MATLAB Hardware-in-The-Loop (HIL) with Arduino using LQR Control
 0:00:10
0:00:10
Lyapunov-Based Control to Swing up an Inverted Pendulum
 0:00:30
0:00:30
LQR control of an Inverted Pendulum
 0:00:20
0:00:20
24-774 Lab 2: Continuous Time LQR Controller
 0:00:07
0:00:07
PID controller Vs LQR Controller for rotary inverted pendulum || STRIPS 1.0
 0:00:33
0:00:33
Ultra Stable Self Balance Robot | PID vs LQR Controller | Research & Development | Robotics Proj...
 0:00:07
0:00:07
Balance using LQR controller
 0:03:01
0:03:01
Onboard State Dependent LQR for Agile Quadrotors
 0:00:22
0:00:22
LQR 50ms
 0:00:30
0:00:30
Implementing a LQR controller for a rotational pendulum
 0:00:44
0:00:44
Inverted Pendulum LQR Swing up
 0:00:12
0:00:12
Self Balancing Robot - Tuned PID
 0:01:35
0:01:35
Inverted pendulum on a cart. Linear-quadratic-Gaussian LQG control with an Arduino Uno controller
 0:07:01
0:07:01
applying an LQR command on a self-balancing robot in Simulink |2021|
 0:00:07
0:00:07
Balancing Robot w/ SQRT KF & LQR Controller
 0:00:13
0:00:13
Self Balancing Robot using Arduino and MPU 6050 #selfbalancing #arduinoproject
 0:00:37
0:00:37
Implementing LQR on Two Wheeled Self Balancing Vehicle-2021
 0:00:20
0:00:20
LQR Control on Segway Robot
 0:00:20
0:00:20
Iterative Learning Control - Simulink - Motor Control with Inverted Pendulum
 0:00:26
0:00:26
Basic Inverted Pendulum using LQR
 0:00:15
0:00:15
Inverted Pendulum : LQR Controller for Tracking Sawtooth Waveform
Комментарии