filmov
tv
Lecture 5 | Image processing & computer vision

Показать описание
Camera calibration with linear least squares
Linear least squares for homogeneous equations
Eigenvalue decomposition
Perspective projection cameras
Estimating intrinsic and extrinsic parameters
Human eye
Blind spot
Linear least squares for homogeneous equations
Eigenvalue decomposition
Perspective projection cameras
Estimating intrinsic and extrinsic parameters
Human eye
Blind spot
 0:05:06
0:05:06
2D Convolution Explained: Fundamental Operation in Computer Vision
 0:13:41
0:13:41
Image Filtering in Frequency Domain | Image Processing II
 1:10:12
1:10:12
CAP5415 Lecture 5 [Image Filtering - Part II] - Fall2021
 1:26:42
1:26:42
Interventional Medical Image Processing (IMIP 2016) - Lecture 5
 0:53:06
0:53:06
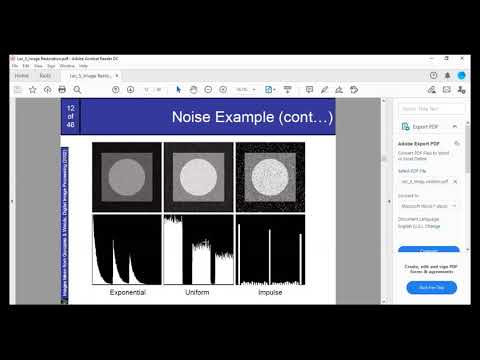
Lecture 5 - Image restoration
 0:10:58
0:10:58
Different types of images in digital image processing. Ch-1 Lecture-5
 1:16:28
1:16:28
DIP Lecture 5: Geometric operations
 0:13:12
0:13:12
Image Restoration in digital image processing
 0:19:03
0:19:03
What is Data Literacy? Class 11 AI (843) | UNIT 5: Data Literacy – Data Collection to Data Analysis...
 0:19:07
0:19:07
Point operations in digital image processing with examples
 0:23:01
0:23:01
But what is a convolution?
 0:06:19
0:06:19
Key stages in digital image processing
 0:30:33
0:30:33
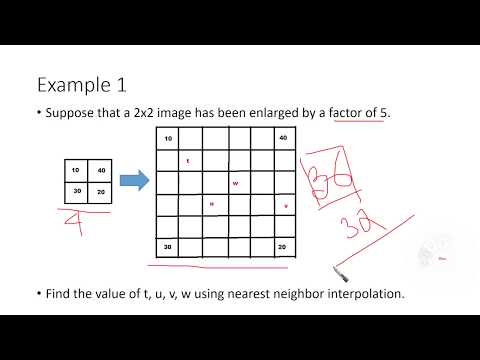
Image Interpolation Examples (Introduction)
 0:16:32
0:16:32
Fourier Transform | Image Processing II
 0:08:01
0:08:01
Relationship between pixels Neighborhood and Adjacency of Pixels
 0:08:09
0:08:09
Introduction to Digital Image processing
 0:13:37
0:13:37
LECTURE 5 - RADIOMETRIC CORRECTION IN DIGITAL IMAGE PROCESSING | GATE GEOMATICS ENGINEERING #gate
 0:06:02
0:06:02
Canny Edge Detector | Edge Detection
 0:10:19
0:10:19
Smoothing Spatial Filters in digital image processing
 0:08:20
0:08:20
Introduction to Digital Image Processing 🔥🔥
 0:05:04
0:05:04
DIP#25 Introduction to image restoration in digital image processing || EC Academy
 0:05:51
0:05:51
Digital Image Processing INTRODUCTION | GeeksforGeeks
 0:08:09
0:08:09
Fourier Transform in 5 minutes: The Case of the Splotched Van Gogh, Part 3
 0:11:01
0:11:01
Hough Transform Explained with Example
Комментарии