filmov
tv
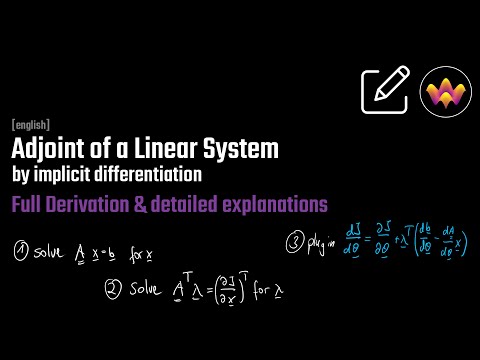
Adjoint Equation of a Linear System of Equations - by implicit derivative

Показать описание
How can you efficiently get the derivatives of a loss function with respect to some parameter vectors if intermediate computation stages involve the solution of a linear system of equations, which is an implicit problem. If you use Automatic Differentiation, you might be inclined to just propagate through the solver of the linear system, e.g., by LU or QR decomposition for dense matrices or an iterative solver for sparse systems. However, this approach introduces many problems that make an efficient application of it infeasible (e.g., vanishing/exploding gradients, high memory requirements for solving intermediary values in reverse-mode). The remedy is to perform some clever bracketing which allows framing the task of taking derivatives as the solution to another linear system of equations, the adjoint system. This adjoint system is created easily and involves the transpose of the system matrix, which is by the way the reason the transpose of a matrix is also called its adjoint.
-------
-------
Timestamps:
00:00 Introduction
01:50 Sensitivities
03:04 Implicit Relations vs. Automatics Differentiation
03:57 Dimensions of the variables
04:22 A (scalar-valued) loss function
05:00 Example for a loss function
05:39 Solution also depends on parameters
06:14 Gradient as Total Derivative
07:37 Gradient is a row vector
09:05 The difficult quantity
09:39 Implicit Derivation
11:06 A naive approach
13:41 Problem of the naive approach
16:49 Remedy: Adjoint Method
19:04 Clever Bracketing
19:54 The adjoint variable
21:18 The adjoint system
22:13 Similar Complexity
22:44 Dimension of the adjoint
23:24 Strategy for loss gradient
25:03 Important finding
25:52 When to use adjoint?
26:33 How to get the other derivatives?
27:55 Outlook: Nested linear systems
28:09 Outro
 0:28:47
0:28:47
Adjoint Equation of a Linear System of Equations - by implicit derivative
 0:13:16
0:13:16
Adjoints
 0:06:23
0:06:23
Solution of system of linear equation by adjoint method
 0:58:21
0:58:21
Lecture 6 Part 1: Adjoint Differentiation of ODE Solutions
 0:09:01
0:09:01
Self-Adjoint Operators
 0:44:26
0:44:26
Lecture 4 Part 2: Nonlinear Root Finding, Optimization, and Adjoint Gradient Methods
 0:24:44
0:24:44
Linear functionals and adjoints part 1: Riesz representation, adjoint
 0:03:35
0:03:35
Adjoint for implicit governing equations
 0:37:23
0:37:23
Green's function for self adjoint linear differential equations
 0:07:32
0:07:32
Differential Equations Question on Self Adjoint Equation and one question on Greens Function
 0:06:54
0:06:54
Definition of adjoint operator
 0:56:59
0:56:59
Adjoint Linear Differential Operator
 0:07:25
0:07:25
Introduction to the adjoint method
 0:05:00
0:05:00
How to Solve 𝑨𝑿=𝑩 Using Adjoint Method
 0:43:27
0:43:27
Adjoint State Method for an ODE | Adjoint Sensitivity Analysis
 0:15:34
0:15:34
Self-Adjoint Transformations
 0:01:54
0:01:54
Example of adjoint operator 1
 0:03:06
0:03:06
3.1.14-Linear Algebra: Matrix Adjoint Operator
 0:00:52
0:00:52
Short Trick to Find Adjoint of A Matrix in 60 Seconds
 0:10:46
0:10:46
Adjoint Equation and related Questions ,Mathematical Method of Physics (MMP) by Dr Nawazish Ali Shah
 0:01:56
0:01:56
3.1.15-Linear Algebra: Self-Adjoint and Symmetric Matrices
 0:06:25
0:06:25
Matrix: Solution Of System Of Linear Equations By Adjoint Method Using Calculator
 0:44:50
0:44:50
Advanced Linear Algebra Lecture 6.5: Self-adjoint differential operators
 0:06:25
0:06:25
ADJOINT OF A LINEAR OPERATOR
Комментарии