filmov
tv
2022: Automated derivation of public urban green spaces via activity-related barriers using OpenStr

Показать описание
Urban green spaces serve people for active and passive recreation. On the basis of OpenStreetMap data, suitable green spaces are to be derived in order to incorporate them as recreation destinations in a location-based service (the “meinGruen” app) as polygons. The modelling approach focuses on activity-related barriers in the context of urban green, transitions between different land use classes, and public accessibility. The case study was implemented for the city of Dresden in Germany.
In addition to important ecosystem services such as clean air or local climate regulation, green spaces provide peace and recreation, contributing to a good quality of life for the population. In high-density urban areas, publicly accessible green spaces are used for a variety of recreational activities, which has become even more important, not least because of the COVID-19 pandemic [1]–[4]. In this context, the research project "Information and Navigation on Urban Green Spaces in Cities - meinGruen" examined publicly accessible green spaces with regard to a variety of criteria in order to assess their suitability for the pursuit of leisure activities, such as going for a walk or playing soccer [3], [5], [6]. The aim of this study is to derive a suitable polygon dataset to describe the spatial distribution of publicly accessible urban green spaces. The presented approach favors the use of OpenStreetMap data and intrinsic knowledge. Advantages of the use of OpenStreetMap data are the global availability, the often high completeness in urban areas as well as the unified open data license ODbL 1.0. In this way, problems with data availability and heterogeneity due to different responsible authorities can be avoided. Ludwig et al. [7] describe an approach to mapping public green spaces based on OpenStreetMap and Sentinel-2 satellite imagery in which barriers and land use changes are considered based on a priori (expert knowledge) assumptions for polygon generation. In the approach presented here, spatial delimitation is to be refined by describing barriers by probability values. The term "barrier" is first analyzed in an interdisciplinary way in order to then work out its meaning for the spatial delimitation of a green space. Here, barriers describe the action space of a recreational activity. While there are a number of object types (such as walls, fences, rivers, roads or railroad lines) can be assumed to be barriers with certainty, there are others (such as paths or the change of land use) for which knowledge is still lacking. The study area includes the city of Dresden in Germany, plus a buffer of five kilometers. OpenStreetMap represents the main data source. For training and validation, official cadastral data (ALKIS) as well as a dataset on cadastral parcels owned by the city of Dresden were used.
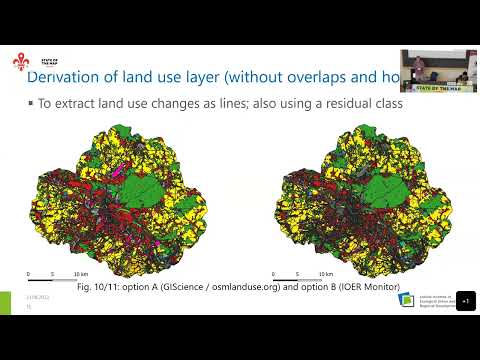
The methodology consists of six steps: First, according to defined rules, types of barriers were extracted from OpenStreetMap data. Second, we derived a land use layer without overlaps and holes from OpenStreetMap. Here, two options were compared regarding different target schemes for land use classification. Third, a mapping in terms of a “ground-truth“ in selected areas in Dresden followed in order to be able to evaluate the existence of a barrier on site for the extracted paths and changes of land use. Fourth, generic probabilities for the existence of a barrier were determined based on path type or land use change type. Fifth, a polygon mesh was created by applying thresholds to the determined barrier probabilities. Sixth, the generated polygons were enriched with attributes on the number of green space-related POI, such as benches, trash cans, or trees. Models for "greenness" and "accessibility" are thereby trained.
For the technical implementation mainly Docker, PostgreSQL/ PostGIS, Python (Geopandas, Scikit-Learn) and Jupyter Notebook were used. Data import was performed by osm2pgsql and ogr2ogr. For mapping we used the app QField.
 0:26:21
0:26:21
 0:01:57
0:01:57
 0:26:11
0:26:11
 0:03:06
0:03:06
 0:12:20
0:12:20
 0:04:45
0:04:45
 0:25:23
0:25:23
 0:12:17
0:12:17
 0:03:40
0:03:40
 0:13:09
0:13:09
 0:02:55
0:02:55
 0:18:01
0:18:01
 1:15:16
1:15:16
 0:03:29
0:03:29
 0:32:34
0:32:34
 0:02:55
0:02:55
 0:07:33
0:07:33
 0:00:20
0:00:20
 0:04:33
0:04:33
 0:29:31
0:29:31
 0:00:57
0:00:57
 0:00:06
0:00:06
 0:03:05
0:03:05
 0:07:56
0:07:56