filmov
tv
Learning a Centroidal Motion Planner for Legged Locomotion

Показать описание
Whole-body optimizers have been successful at automatically computing complex dynamic locomotion behaviors. However they are often limited to offline planning as they are computationally too expensive to replan with a high frequency. Simpler models are then typically used for online replanning. In this paper we present a method to generate whole body movements in real-time for locomotion tasks. Our approach consists in learning a centroidal neural network that predicts the desired centroidal motion given the current state of the robot and a desired contact plan. The network is trained using an existing whole body motion optimizer. Our approach enables to learn with few training samples dynamic motions that can be used in a complete whole-body control framework at high frequency, which is usually not attainable with typical full-body optimizers. We demonstrate our method to generate a rich set of walking and jumping motions on a real quadruped robot.
 0:02:18
0:02:18
Learning a Centroidal Motion Planner for Legged Locomotion
 0:10:15
0:10:15
Multi-Fidelity Receding Horizon Planning for Multi-Contact Locomotion
 0:02:48
0:02:48
Learning Coordinated Terrain-Adaptive Locomotion by Imitating a Centroidal Dynamics Planner
 0:03:00
0:03:00
Efficient Humanoid Contact Planning using Learned Centroidal Dynamics Prediction
 0:05:12
0:05:12
Multi-Fidelity Receding Horizon Planning for Multi-Contact Locomotion
 0:00:53
0:00:53
Computationally Efficient Prioritized Whole-Body Controller with Contact Constraints
 0:32:54
0:32:54
A QP control framework based on centroidal momentum and motion constraints
 0:03:00
0:03:00
On Time Optimization of Centroidal Momentum Dynamics
 0:02:13
0:02:13
Online Centroidal Angular Momentum Reference Generation and Motion Optimization
 0:04:55
0:04:55
Online Non-linear Centroidal MPC for Humanoid Robots Payload Carrying with Force Parametrization
 0:01:03
0:01:03
Precise Jump Planning using Centroidal Dynamics based Bilevel Optimization
 0:04:04
0:04:04
An Optimal Motion Planning Framework for Quadruped Jumping
 0:05:05
0:05:05
CoRL 2020, Spotlight Talk 70: Learning Obstacle Representations for Neural Motion Planning
 0:01:00
0:01:00
CROC: Convex Resolution Of Centroidal dynamics trajectories
 0:01:28
0:01:28
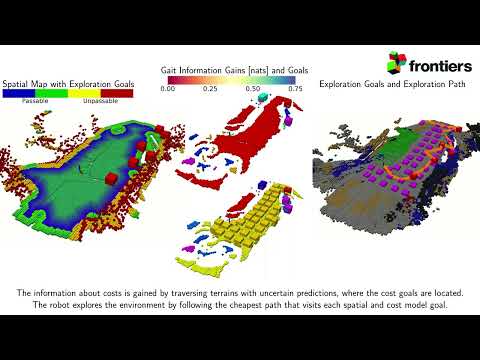
Autonomous robotic exploration with simultaneous environment and traversability models learning
 0:57:24
0:57:24
Yu-Chi Lin: PhD Defense
 0:01:31
0:01:31
Impedance Control of Humanoid Walking on Uneven Terrain With Centroidal Momentum Dynamics Using QP
 0:03:01
0:03:01
Receding-Horizon Perceptive Trajectory Optimization with Learned Initialization
 0:04:56
0:04:56
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L/IROS 2022
 0:03:09
0:03:09
C-CROC: Continuous and Convex Resolution of Centroidal dynamic trajectories
 0:00:31
0:00:31
Centroidal Dynamics + PGPE algorithm on Laikago Robot
 0:00:17
0:00:17
centroid visualization without zoom/angle effect
 0:01:16
0:01:16
Planning and Control for Dynamic Quadrupedal Locomotion | Simulation Demo
 0:02:59
0:02:59
Inclusion of Angular Momentum During Planning for Capture Point Based Walking
Комментарии