filmov
tv
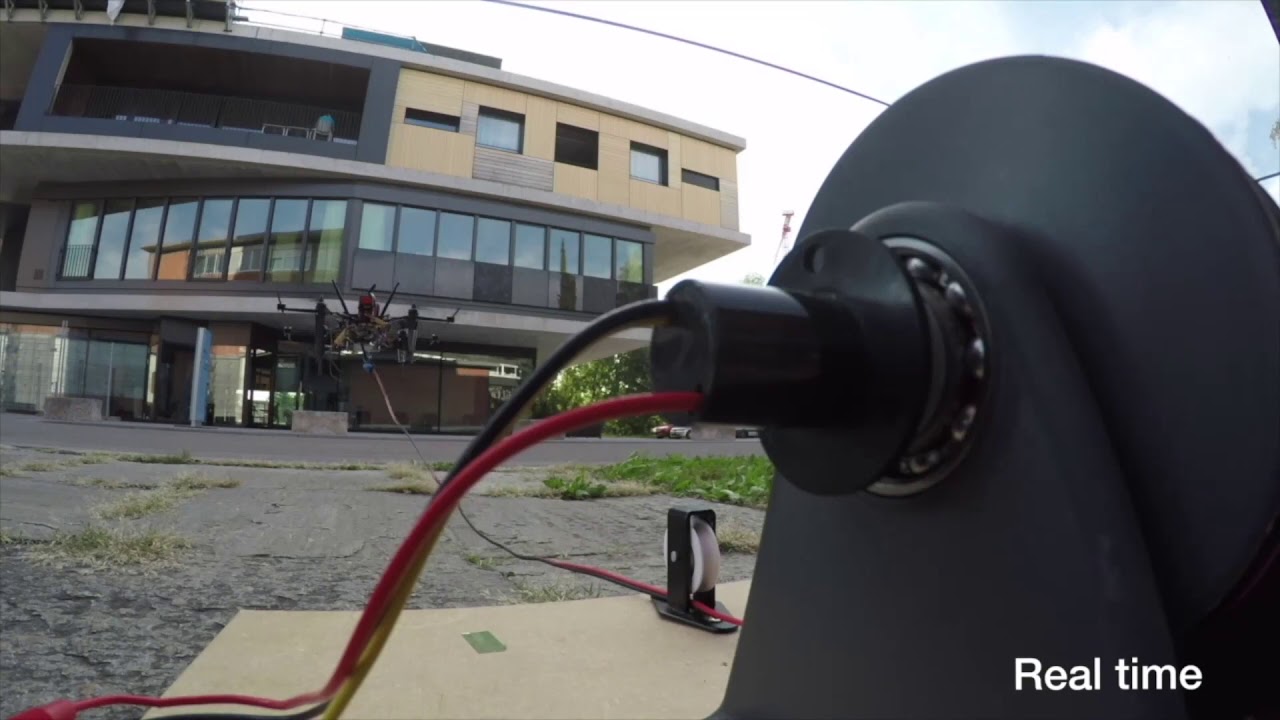
A tether-powered automatic scanning system for repetitive monitoring
Показать описание
Video publication: IEEE ICRA 2019
Abstract: With the growing demand for industrial automation and future resilient infrastructure systems, there is clear need for continuous self-assessment/self-certification system for building sites and industrial structures.
In this video, we present a small-scale mobile system, which is formed of a ground station and an airborne platform constrained and connected by an electrical tether. Since conventional tethered systems usually rely on the airborne platform pulling against the tether-tension controller in addition to the mass of the tether, the airborne platform has to have a significant size to create the payload margin for this operation. Moreover, the dynamic trajectory tracking accuracy can be significantly degraded.
To the best of our knowledge, this is the first time an automatic tethered system is realized in such a small scale, thanks to the active wheel, which fuses the trajectory velocity command with the visual-inertial odometry from the airborne platform as the feedforward term for the tension controller. In addition to the indefinite power from the ground, the airborne platform is able to perform trajectory tracking regardless of the mechanical disturbance from the tether.
The airborne platform performs monocular structure from motion on the onboard embedded GPU and uses deep-learning algorithms to detect objects of interest and track changes in the structure through long-duration monitoring.
Abstract: With the growing demand for industrial automation and future resilient infrastructure systems, there is clear need for continuous self-assessment/self-certification system for building sites and industrial structures.
In this video, we present a small-scale mobile system, which is formed of a ground station and an airborne platform constrained and connected by an electrical tether. Since conventional tethered systems usually rely on the airborne platform pulling against the tether-tension controller in addition to the mass of the tether, the airborne platform has to have a significant size to create the payload margin for this operation. Moreover, the dynamic trajectory tracking accuracy can be significantly degraded.
To the best of our knowledge, this is the first time an automatic tethered system is realized in such a small scale, thanks to the active wheel, which fuses the trajectory velocity command with the visual-inertial odometry from the airborne platform as the feedforward term for the tension controller. In addition to the indefinite power from the ground, the airborne platform is able to perform trajectory tracking regardless of the mechanical disturbance from the tether.
The airborne platform performs monocular structure from motion on the onboard embedded GPU and uses deep-learning algorithms to detect objects of interest and track changes in the structure through long-duration monitoring.
 0:01:45
0:01:45
 0:01:45
0:01:45
 0:01:45
0:01:45
 0:01:45
0:01:45
 0:00:37
0:00:37
 0:00:36
0:00:36
 0:02:29
0:02:29
 0:01:11
0:01:11
 0:00:27
0:00:27
 0:08:07
0:08:07
 0:00:23
0:00:23
 0:00:46
0:00:46
 0:00:18
0:00:18
 0:00:16
0:00:16
 0:01:09
0:01:09
 0:01:00
0:01:00
 0:00:17
0:00:17
 0:00:20
0:00:20
 0:00:24
0:00:24
 0:00:36
0:00:36
 0:00:11
0:00:11
 0:00:15
0:00:15
 0:00:12
0:00:12
 0:00:21
0:00:21