filmov
tv
Interior Point Method for Optimization

Показать описание
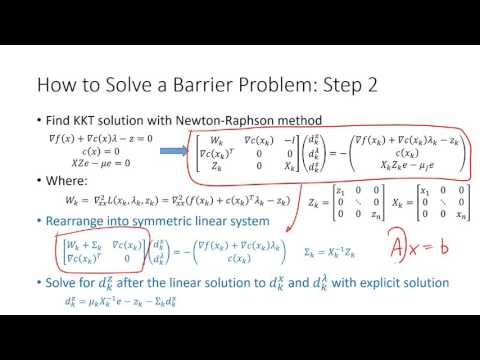
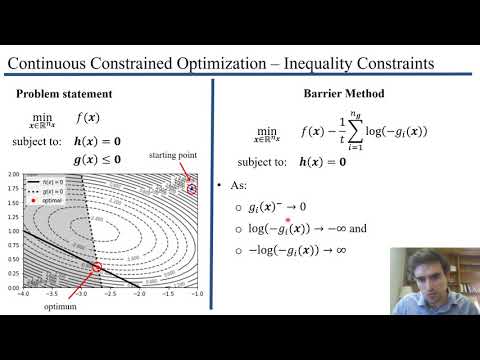
Interior point methods or barrier methods are a certain class of algorithms to solve linear and nonlinear convex optimization problems. Violation of inequality constraints are prevented by augmenting the objective function with a barrier term that causes the optimal unconstrained value to be in the feasible space.
 0:18:12
0:18:12
Interior Point Method for Optimization
 0:15:43
0:15:43
Interior-point methods for constrained optimization (Logarithmic barrier function and central path)
 0:21:58
0:21:58
The Karush–Kuhn–Tucker (KKT) Conditions and the Interior Point Method for Convex Optimization
 0:07:48
0:07:48
Linear Programming 37: Interior point methods
 0:36:14
0:36:14
3.3 Optimization Methods - The Interior Point Method
 0:25:00
0:25:00
Interior Point Method Optimization Example in MATLAB
 0:14:42
0:14:42
A Faster Interior Point Method for Semidefinite Programming
 0:53:43
0:53:43
An Interior Point Solver for Large Block Angular Optimization Problems
 1:15:00
1:15:00
Aaron Sidford: Introduction to interior point methods for discrete optimization, lecture I
 0:02:14
0:02:14
Optimal Control Example 2 using Interior Point method
 0:35:36
0:35:36
A geodesic interior-point method for linear optimization over symmetric cones
 0:11:35
0:11:35
What Is Mathematical Optimization?
 1:47:53
1:47:53
Lecture 12 Interior point methods
 0:20:45
0:20:45
Lecture 23: Interior Point Method
 0:06:47
0:06:47
Interior point method
 1:08:29
1:08:29
Interior Point Methods 4
 0:08:59
0:08:59
Interior Point Method: Theory
 1:21:36
1:21:36
A primal-dual interior-point algorithm for nonsymmetric conic optimization
 0:06:52
0:06:52
An Interior Point Method Solving Motion Planning Problems with Narrow Passages
 1:31:49
1:31:49
Lecture 54 : Interior-Point Method for QPP
 0:06:33
0:06:33
Constraints and Barrier Method
 0:11:26
0:11:26
Visually Explained: Newton's Method in Optimization
 0:24:14
0:24:14
JuMP-dev 2019 | Mathieu Tanneau | Tulip.jl: An interior-point solver with abstract linear algebra
 0:07:19
0:07:19
Interior Point Method: Log-Barrier
Комментарии