filmov
tv
Resolver theory of operation. Advantages vs Encoders, good shielding, and arc seconds of resolution.

Показать описание
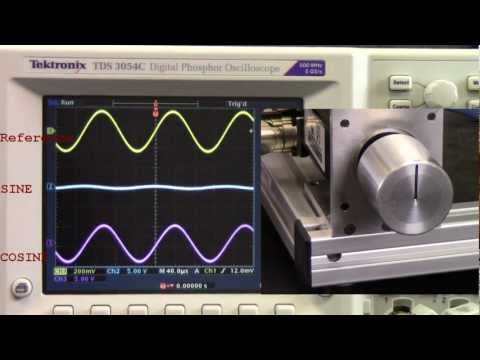
Basic theory of operation with pointers to finding the mathematics of demodulating the SIN an COS signals developed through property of mutual inductance when rotor turns excitation coil 360 Deg. with respect to stator coils for SIN COS modulated excitation. How to confirm resolver can take 4Vrms, what is +/- a decibel of flat gain or transformer for kHz excitation, and how to stay above +/-250mVp-p with 2:1 or 1:2 turns ratio using AGC (Automatic Gain Control).
The resolver is one of the most rugged feedback devices possible. It is popular in the aerospace and defense industry as it is made of passive components, can operate above 155 Deg C, has over 100 years of MTBF, and high resolution +/- few arc seconds sufficient for many applications.
Advantages include absolute position for one resolver cycle (typically one cycle/motor rev but more with multi speed), no Halls required for commutation, and easily over 100 yards of cable distance is possible without count drift. Motor companies know how to wind so making a resolver is cheap or they buy a low cost high resolution Tamagawa and mount it. The Copley Xenus Plus, Accelnt Plus, and Argus have -R resolver option and can do 2^16 bits of resolution with fair ENOB (effective number of bits). Copley also offers a CRS (Copley Serial Resolver) chip that converts resolver to digital clock and data. More to come on this in the Copley CSR video but for now know that even with a -R drive CME can still select most all feedback types: Incremental with Halls, Absolute Biss-C, etc. and even the new CSR with FW 4.60 or greater.
Good resolver cabling, grounding, and shielding is investigated to improve signal to noise ratio for highest possible count resolution. How to troubleshoot a feedback fault with resolver with an ohms meter, monitoring voltage stator SIN and COS from excitation by rotating the rotor, and how not to blow up my drive.
The resolver is one of the most rugged feedback devices possible. It is popular in the aerospace and defense industry as it is made of passive components, can operate above 155 Deg C, has over 100 years of MTBF, and high resolution +/- few arc seconds sufficient for many applications.
Advantages include absolute position for one resolver cycle (typically one cycle/motor rev but more with multi speed), no Halls required for commutation, and easily over 100 yards of cable distance is possible without count drift. Motor companies know how to wind so making a resolver is cheap or they buy a low cost high resolution Tamagawa and mount it. The Copley Xenus Plus, Accelnt Plus, and Argus have -R resolver option and can do 2^16 bits of resolution with fair ENOB (effective number of bits). Copley also offers a CRS (Copley Serial Resolver) chip that converts resolver to digital clock and data. More to come on this in the Copley CSR video but for now know that even with a -R drive CME can still select most all feedback types: Incremental with Halls, Absolute Biss-C, etc. and even the new CSR with FW 4.60 or greater.
Good resolver cabling, grounding, and shielding is investigated to improve signal to noise ratio for highest possible count resolution. How to troubleshoot a feedback fault with resolver with an ohms meter, monitoring voltage stator SIN and COS from excitation by rotating the rotor, and how not to blow up my drive.
 0:12:03
0:12:03
Resolver theory of operation. Advantages vs Encoders, good shielding, and arc seconds of resolution.
 0:04:28
0:04:28
Resolver
 0:04:43
0:04:43
Resolver
 0:02:06
0:02:06
𝐓𝐀𝐌𝐀𝐆𝐀𝐖𝐀 𝐑𝐞𝐬𝐨𝐥𝐯𝐞𝐫 𝐩𝐫𝐢𝐦𝐚𝐫𝐲 𝐚𝐧𝐝 𝐬𝐞𝐜𝐨𝐧𝐝𝐚𝐫𝐲 𝐮𝐧𝐢𝐭 𝐦𝐞𝐚𝐬𝐮𝐫𝐞𝐦𝐞𝐧𝐭 | 𝐒𝐦𝐚𝐫𝐭𝐬𝐲𝐧 𝐓𝐒𝟐𝟔𝟓𝟏𝐍𝟏𝟒𝟏𝐄𝟕𝟖 @FlowChart...
 0:02:56
0:02:56
Difference between encoder and resolver
 0:00:36
0:00:36
How to test ELECTRICAL RESOLVER #electrical #technology #educational #education
 0:01:16
0:01:16
Mosolver = motor + resolver
 0:06:26
0:06:26
Introducing the Resolver
 0:53:52
0:53:52
Leyes de Exponentes | Matemáticas desde Cero
 0:03:02
0:03:02
What is Resolver? How Does a Resolver Work?
 0:10:16
0:10:16
GraphQL: Unraveling the Power of Resolver Chaining
 0:00:10
0:00:10
Resolver signals.
 0:02:45
0:02:45
TI-5000JX Resolver Setup, Testing, and Alignment
 0:13:04
0:13:04
CSR (Copley Serial Resolver) Chip and Adapter - 16 bit resolution CLK & Data good ENOB, SNR, and...
 0:04:40
0:04:40
Asymmetric Encryption - Simply explained
 0:08:00
0:08:00
String Theory Explained – What is The True Nature of Reality?
 0:02:22
0:02:22
GraphQL Explained in 100 Seconds
 0:02:30
0:02:30
Electronics: Reading a resolver sensor with a long cable
 0:05:23
0:05:23
How to Solve a Problem in Four Steps: The IDEA Model
 0:09:58
0:09:58
5 Major Problems With The Big Bang Theory | Answers With Joe
 0:01:27
0:01:27
PXI & PXIe LVDT/RVDT/Resolver Simulator Module (Model 41/43-670)
 0:18:36
0:18:36
Understanding the Finite Element Method
 0:05:47
0:05:47
TAMAGAWA RESOLVER NASIL ÖLÇÜLÜR
 0:10:08
0:10:08
What is the Difference between Absolute and Incremental Encoders?
Комментарии