filmov
tv
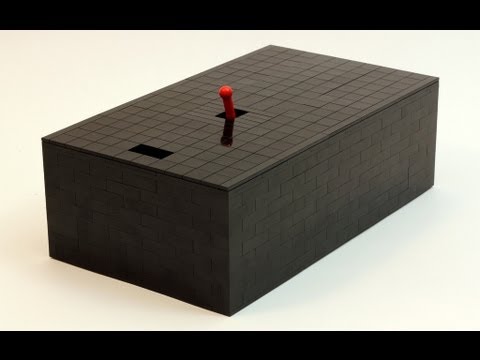
Attitude calculation on the NXT using a 6DOF IMU sensor

Показать описание
This clips shows how accurate a IMU sensor can be. An IMU sensor combines a 3 axis gyro and a 3 axis accelerometer. The signals from both sensors are combined using a nonlinear complementary filter to get an output signal that has low noise and is drift free. (Well actually it is only drift free over 2 axis. It still drifts over the Z-axis.)
This home made sensor will show a blue light when it is horizontal using a 0.5 degrees margin. Otherwise the light will turn red.
This home made sensor will show a blue light when it is horizontal using a 0.5 degrees margin. Otherwise the light will turn red.
 0:00:39
0:00:39
Attitude calculation on the NXT using a 6DOF IMU sensor
 0:00:50
0:00:50
Edge puts one over on Kurt Angle again 20 years later! #short #wweraw
 0:00:16
0:00:16
Dolph Ziggler Steals Will's WWE Championship
 0:00:17
0:00:17
What Went Wrong with Awm 😵 #shorts #freefire #tondegamer
 0:00:33
0:00:33
Brock Lesnar brutal beat kids #wwe #shorts #brocklesnar
 0:01:03
0:01:03
Time-lapse video of Jeff Hardy applying his face paint
 0:00:47
0:00:47
1vs6 😱 Impossible UMP Clutch Against Pc Players Without Helmet 🔥😱 Hack Spotted ??
 0:02:23
0:02:23
Jason vs The Ultimate LEGO Machine (LuuMa EV3)
 0:03:48
0:03:48
Ajith's Powerful Performance🔥 | Mankatha | Action Scene | Trisha | Arjun | Vaibhav| Andrea | Su...
 0:09:22
0:09:22
TEXAS DEATH MATCH! AEW International Champ Orange Cassidy vs UK’s Matt Taven! | 2/14/24 AEW Dynamite...
 0:01:40
0:01:40
Smooth transitions between robot movements (a Lego NXT holonomic robot)
 0:00:17
0:00:17
Dono Bhai Ne Mil k Tod diya kia sonet 😭😭
 0:00:10
0:00:10
BGMI Emotes in Real Life 🙈 | #Shorts
 0:00:47
0:00:47
NXT and IMU sensor, transformation Matrix
 0:00:46
0:00:46
funny program in c|send this WhatsApp group #shorts#programming#coding#cprogramming#funny#clanguage
 0:00:15
0:00:15
rip John Cena | WWE Death | wwe john cena #shorts
 0:00:16
0:00:16
ilja Dragunov Coast to Coast #shorts #nxt #wwe2k23
 0:00:26
0:00:26
NXT laser gun
 0:00:19
0:00:19
WWE NXT - Women's Division - Roar of the Crowd Intro
 0:00:35
0:00:35
NXT Laser gun 2
 0:04:29
0:04:29
WWE '13 NXT Arena Formula By TGreatOne
 0:05:33
0:05:33
Dhanush hit by duster | Kaadhal Kondein | Iconic scene | Sonia Agarwal | Full Movie on SUN NXT
 0:19:09
0:19:09
Aptitude Questions for TCS,DXC & Accenture | Solve in 30Seconds | Best Tricks
 0:01:00
0:01:00
Fake 😠 WWE , #wwe #romanreigns #wrestling
Комментарии