filmov
tv
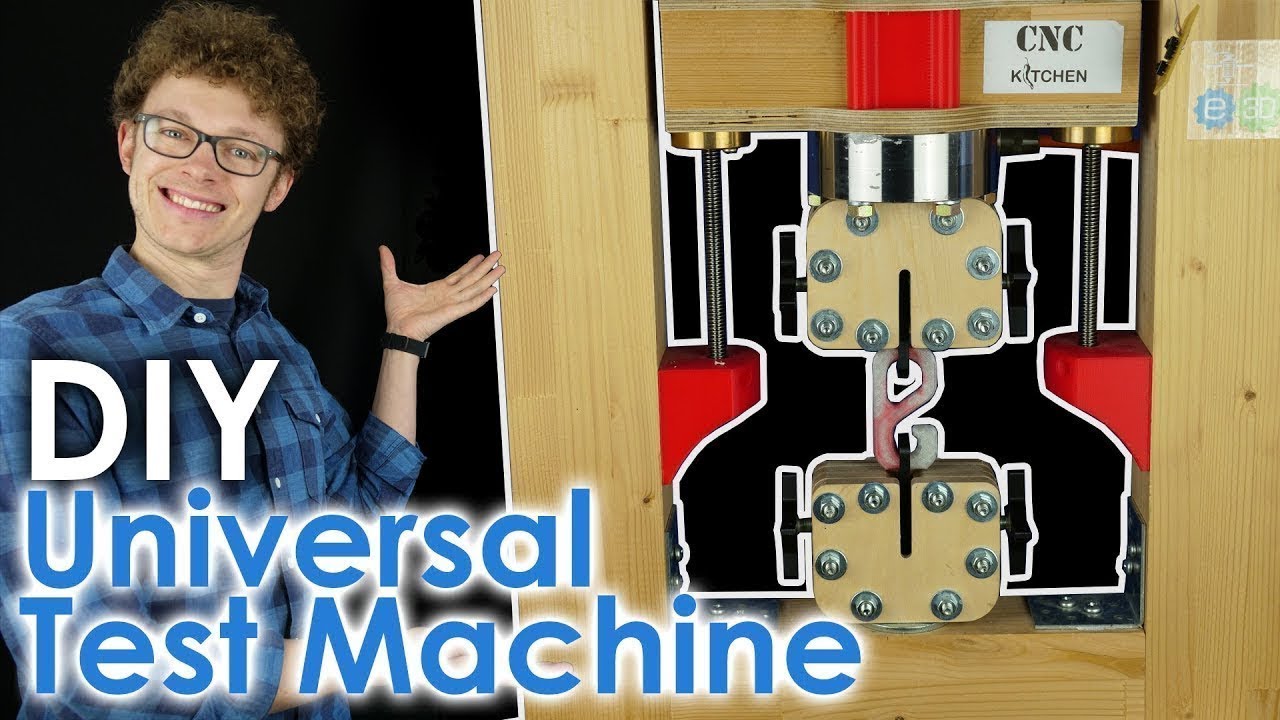
Fully OPEN SOURCE Universal Test Machine!
Показать описание
This is my DIY Universal Test Machine that I use in many of my videos to test the strength of different materials and parts. I finally gathered all the data and made it available open source so that everyone can build on on their own. I'll go through the whole setup and also show how I managed to build an optical extensometer to measure the strain in the test samples.
💚 Support me 💚
Join as a YouTube member!
🎙Check out my PODCAST with Tom Sanladerer
⚙ My gear (Affiliate Links):
🎥 CAMERAS & LENSES
🎙AUDIO
🔴 LIVE STREAMING
Some parts you'll need:
🏆 Do you want to help me cover my running costs? Send me a dollar or two over PayPal, it helps me a lot!
🌼 Even watching the ads before my videos helps me a lot!
Disclaimer: This video was sponsored by Skillshare.
💚 Support me 💚
Join as a YouTube member!
🎙Check out my PODCAST with Tom Sanladerer
⚙ My gear (Affiliate Links):
🎥 CAMERAS & LENSES
🎙AUDIO
🔴 LIVE STREAMING
Some parts you'll need:
🏆 Do you want to help me cover my running costs? Send me a dollar or two over PayPal, it helps me a lot!
🌼 Even watching the ads before my videos helps me a lot!
Disclaimer: This video was sponsored by Skillshare.
 0:19:30
0:19:30
Fully OPEN SOURCE Universal Test Machine!
 0:03:51
0:03:51
What is a Universal Testing Machine/Tensile Testing Machine?
 0:00:16
0:00:16
Tensile Testing of Multiflora Rose Stem Using Instron Universal Testing Machine | Dr. Loay Al-Zube
 0:00:25
0:00:25
WDW 50KN 100KN Universal Testing Machine Video
 0:01:03
0:01:03
Universal Testing Machine for Compression testing & Tensile testing
 0:00:41
0:00:41
universal test machine
 0:10:12
0:10:12
HD-B604-S Universal Testing Machine
 0:02:10
0:02:10
Test Step Explanations for the Universal Test Machine
 0:40:24
0:40:24
Master the Art of Tomcat Penetration Testing in 2025
 0:00:27
0:00:27
Universal testing machine in solidworks
 0:01:18
0:01:18
universal tensile testing machine software installation operation video
 0:00:49
0:00:49
universal testing machine!
 0:00:16
0:00:16
Universal Testing Machine #mechanicalengineering #lab
 0:03:16
0:03:16
Customized heightening type universal tensile test machine HZ-1004B
 0:04:01
0:04:01
How to Choose the Right Tensile Tester (Universal Testing Machine) for your Needs! - 2020
 0:00:12
0:00:12
manually writing data to a HDD...kinda #shorts
 0:01:46
0:01:46
DYNO UNIVERSAL | UNIVERSAL TESTING MACHINE FOR TENSILE, COMPRESSION, BENDING AND PEELING TESTS
 0:00:17
0:00:17
PW Instrument Automatic Universal Material Tensile Testing Machine Production Department
 0:01:22
0:01:22
Universal Testing Machine - For Fabric tensile testing
 0:00:18
0:00:18
Computer controlled electro hydraulic servo universal testing machine # tensile strength testing mac
 0:00:26
0:00:26
Simple universal testing machine- hydraulic press
 0:09:31
0:09:31
UNIVERSAL TESTING MACHINE
 0:16:24
0:16:24
This $9 Universal ROM Burner is Open Source!
 0:03:54
0:03:54
100KN Universal Testing Machine - Copper Bar Tensile Test
Комментарии