filmov
tv
Fast Multi-Pass 3D Point Segmentation Based on a Structured Mesh Graph for Ground Vehicles
Показать описание
This video belongs to our paper submitted to IV 2018 (published):
Patrick Burger and Hans-Joachim Wuensche, "Fast Multi-pass 3D Point Segmentation Based on a Structured Mesh Graph for Ground Vehicles"
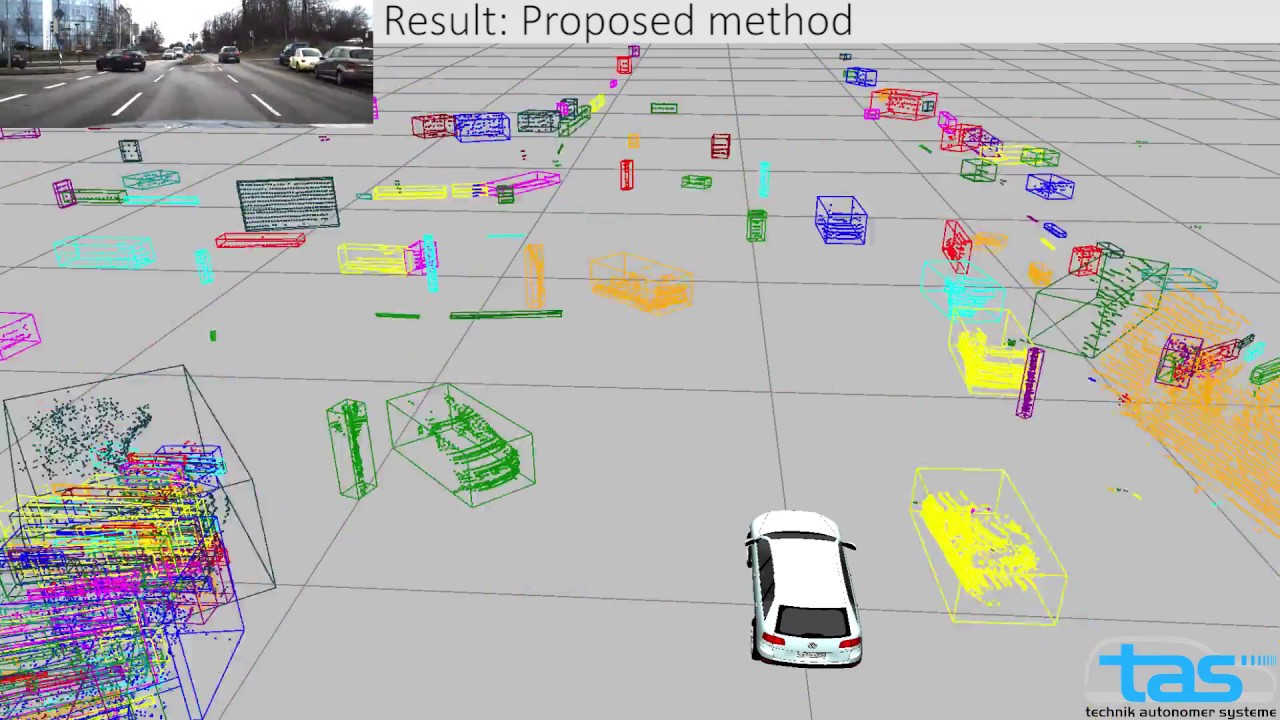
Point-cloud segmentation of 3D LiDAR scans is an important preprocessing task for autonomous vehicles in onroad and especially in off-road scenarios. Clustering point measurements with the same properties into multiple homogeneous regions is a challenging task due to an uneven sampling density and lack of explicit structural information. This paper presents a novel technique to achieve a robust and fast point-cloud segmentation using the characteristic intrinsic sensor pattern.
This pattern is characterized by the mounting position of each laser diode. A structured mesh graph is created by taking the beam calibration and the chronology of incoming data packets into account. The proposed graph-based, multi-pass point segmentation algorithm compares this pattern with a flat-world model to detect discontinuities and to set label attributes such as obstacle or free space for each vertex. Furthermore, we directly detect missing measurements and therefore generate artificial vertices considering the laser beam intrinsics. Finally, a region-growing algorithm is applied in order to obtain cohesive objects. Experimental results show that we achieve a reliable overall performance and a good trade-off between segmentation quality and runtime of 15 ms in rough terrain as well as suburban areas.
Patrick Burger and Hans-Joachim Wuensche, "Fast Multi-pass 3D Point Segmentation Based on a Structured Mesh Graph for Ground Vehicles"
Point-cloud segmentation of 3D LiDAR scans is an important preprocessing task for autonomous vehicles in onroad and especially in off-road scenarios. Clustering point measurements with the same properties into multiple homogeneous regions is a challenging task due to an uneven sampling density and lack of explicit structural information. This paper presents a novel technique to achieve a robust and fast point-cloud segmentation using the characteristic intrinsic sensor pattern.
This pattern is characterized by the mounting position of each laser diode. A structured mesh graph is created by taking the beam calibration and the chronology of incoming data packets into account. The proposed graph-based, multi-pass point segmentation algorithm compares this pattern with a flat-world model to detect discontinuities and to set label attributes such as obstacle or free space for each vertex. Furthermore, we directly detect missing measurements and therefore generate artificial vertices considering the laser beam intrinsics. Finally, a region-growing algorithm is applied in order to obtain cohesive objects. Experimental results show that we achieve a reliable overall performance and a good trade-off between segmentation quality and runtime of 15 ms in rough terrain as well as suburban areas.
 0:08:36
0:08:36
Fast Multi-Pass 3D Point Segmentation Based on a Structured Mesh Graph for Ground Vehicles
 0:01:02
0:01:02
Fast Segmentation of 3D Point Clouds: A Paradigm on LiDAR Data for Autonomous Vehicle Applications
 0:00:25
0:00:25
DesaySeg: Fast 3D Point Cloud Segmentation for Autonomous Driving
 0:00:39
0:00:39
DesaySeg: Fast 3D Point Cloud Segmentation for Autonomous Driving
 0:00:29
0:00:29
DesaySeg: Fast 3D Point Cloud Segmentation for Autonomous Driving
 0:00:39
0:00:39
DesaySeg: Fast 3D Point Cloud Segmentation for Autonomous Driving
 0:01:01
0:01:01
PASS3D: Precise and Accelerated Semantic Segmentation for 3D Point Cloud
 0:02:14
0:02:14
GndNet: Fast Ground Plane Estimation and Point Cloud Segmentation for Autonomous Vehicles
 0:06:35
0:06:35
VisionLidar - Tutorial - Selection & segmentation
 0:02:08
0:02:08
Semantic Segmentation of 3D Point Cloud
 0:35:30
0:35:30
20200114_AGIST_Unsupervised Domain Adaptation for 3D Lidar Point Cloud Semantic Segmentation
 0:01:08
0:01:08
3D Fusion-Based Road Segmentation
 0:00:53
0:00:53
Incremental point cloud segmentation - autonomous driving
 0:00:45
0:00:45
Lidar 3D cloud Segmentation in real-time : ground, building, etc
 0:00:24
0:00:24
Automatic segmentation of road environment from point cloud data obtained by mobile laser scanner.
 0:01:00
0:01:00
Interactive Region Growing Segmentation of Large Unorganized Point Clouds
 0:01:16
0:01:16
3D Point Cloud Segmentation Using Topological Persistence
 0:01:07
0:01:07
Real-time and accurate segmentation of 3D point clouds based on Gaussian process regression
 0:18:23
0:18:23
3D Point Cloud Segmentation and Shape Recognition with Python
 0:00:25
0:00:25
Philosys Ground Truth Annotator - 3D Semantic Segmentation from Label Data
 0:09:59
0:09:59
VMVF: Virtual Multi-view Fusion for 3D Semantic Segmentation
 0:14:38
0:14:38
SHREC2020: 3D Point Cloud Semantic Segmentation for Street Scenes
 0:04:28
0:04:28
RSS 2020': LatticeNet: Fast Point Cloud Segmentation Using Permutohedral Lattices
 0:00:46
0:00:46
Exploring Spatial Context for 3D Semantic Segmentation of Point Clouds
Комментарии