filmov
tv
Distributed Coordination of Multi-agent System in Dynamic Obstacle Environment

Показать описание
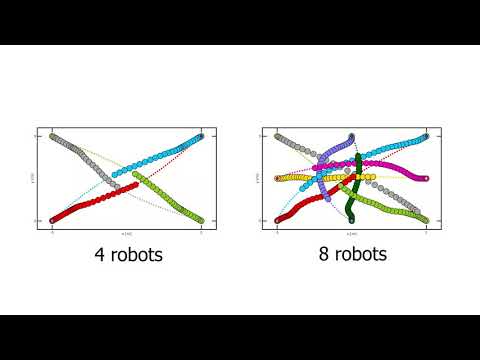
Agents (multi-rotor vehicles) are supposed to take the shape of U M, while maintaining safe distance from each other and dynamic obstacles (red ones). The environment also has bounded, but unknown state (wind) disturbances.
Under the effect of our designed robust controller, agents do form the required shape, while counteracting the wind disturbance and avoiding collisions.
Under the effect of our designed robust controller, agents do form the required shape, while counteracting the wind disturbance and avoiding collisions.
 0:01:46
0:01:46
 0:01:55
0:01:55
 0:04:17
0:04:17
 0:03:13
0:03:13
 1:09:47
1:09:47
 0:42:05
0:42:05
 0:00:47
0:00:47
 0:00:33
0:00:33
 0:14:18
0:14:18
 0:29:04
0:29:04
 0:58:31
0:58:31
 1:08:15
1:08:15
 0:41:59
0:41:59
 0:01:23
0:01:23
 0:02:24
0:02:24
 0:01:40
0:01:40
 0:03:36
0:03:36
 0:45:55
0:45:55
 1:23:10
1:23:10
 0:05:56
0:05:56
 0:31:27
0:31:27
 0:02:02
0:02:02
 0:04:58
0:04:58
 0:59:29
0:59:29