filmov
tv
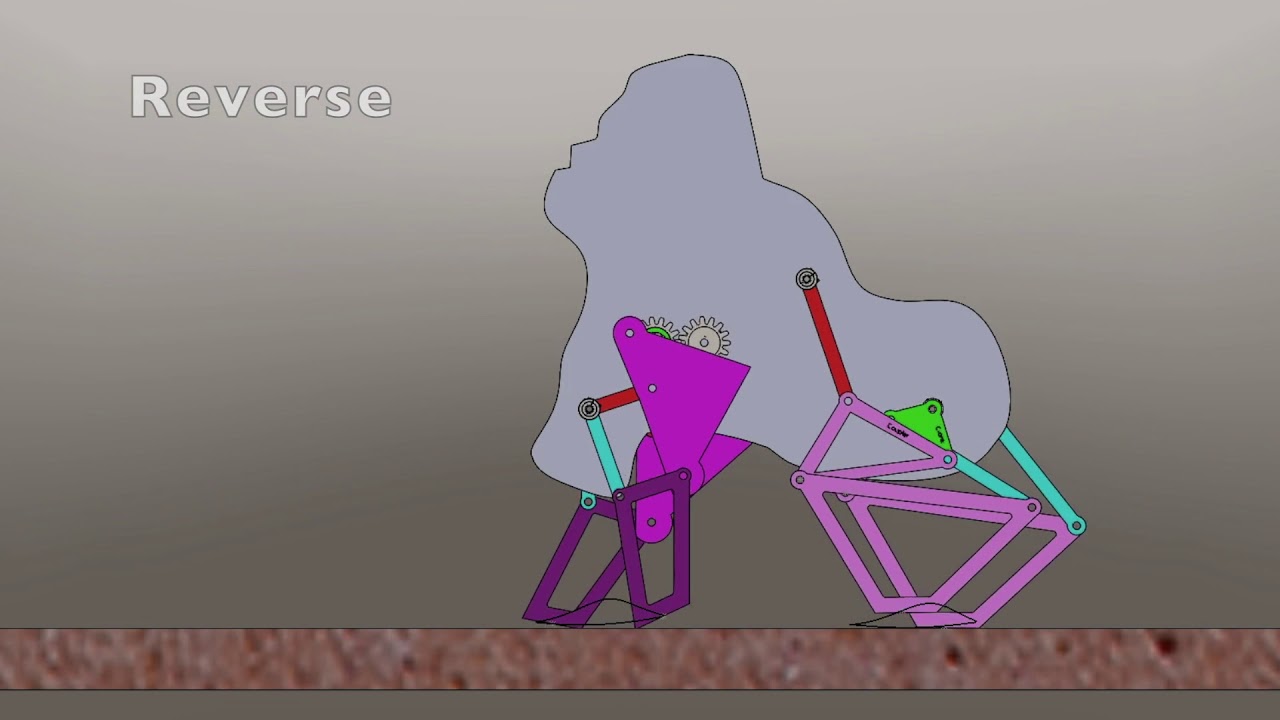
Mechanical Walker Team 1
Показать описание
This mechanical walker was designed by a student team in my Fall 2019 Kinematic Synthesis course. The foot trajectories are four-bar coupler curves designed by the students. They also designed skew-pantograph linkages for the front legs and rectilinear six-bar linkages for the rear legs.
 0:01:14
0:01:14
 0:01:42
0:01:42
 0:00:54
0:00:54
 0:00:33
0:00:33
 0:00:29
0:00:29
 0:01:27
0:01:27
 0:01:12
0:01:12
 0:18:04
0:18:04
 0:01:13
0:01:13
 0:01:15
0:01:15
 0:00:19
0:00:19
 0:01:00
0:01:00
 0:03:17
0:03:17
 0:05:45
0:05:45
 0:00:36
0:00:36
 0:00:52
0:00:52
 0:02:32
0:02:32
 0:04:27
0:04:27
 0:00:44
0:00:44
 0:00:06
0:00:06
 0:00:38
0:00:38
 0:01:28
0:01:28
 0:04:02
0:04:02
 0:01:07
0:01:07