filmov
tv
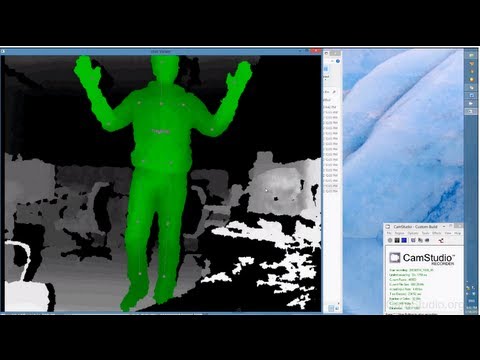
Kinect - OpenNI - NiTE - OpenCV - Robotic System - Skeleton

Показать описание
Slovak University of Technology in Bratislava
FACULTY OF ELECTRICAL ENGINEERIG AND INFORMATION TECHNOLOGY
Study Programme: Industrial informatics
Bachelor Thesis: Use of special visual system in service robotics
Text - The aim of this bachelor thesis is to study issues of the rescue robotics and designing my own visual system for a robot. The Microsoft Kinect camera has been selected as the visual system. This camera allows you to record the real world through 3D depth sensors and to detect human figures in the picture. Image processing algorithms have been applied to this camera - searching ring by means of the Hough transformation and calculation of its real radius, finding square drive, recognizing a person and specifying his/her position in the real world, recognizing the human skeleton, the application of motion gestures utilizable in robotic systems.
FACULTY OF ELECTRICAL ENGINEERIG AND INFORMATION TECHNOLOGY
Study Programme: Industrial informatics
Bachelor Thesis: Use of special visual system in service robotics
Text - The aim of this bachelor thesis is to study issues of the rescue robotics and designing my own visual system for a robot. The Microsoft Kinect camera has been selected as the visual system. This camera allows you to record the real world through 3D depth sensors and to detect human figures in the picture. Image processing algorithms have been applied to this camera - searching ring by means of the Hough transformation and calculation of its real radius, finding square drive, recognizing a person and specifying his/her position in the real world, recognizing the human skeleton, the application of motion gestures utilizable in robotic systems.
 0:03:10
0:03:10
 0:00:30
0:00:30
 1:03:57
1:03:57
 0:00:17
0:00:17
 0:04:00
0:04:00
 0:02:44
0:02:44
 0:03:28
0:03:28
 0:01:26
0:01:26
 0:00:46
0:00:46
 0:08:02
0:08:02
 0:03:13
0:03:13
 0:07:24
0:07:24
 0:01:56
0:01:56
 0:00:59
0:00:59
 0:01:34
0:01:34
 0:06:36
0:06:36
 0:00:58
0:00:58
 0:01:10
0:01:10
 0:01:27
0:01:27
 0:00:50
0:00:50
 0:30:06
0:30:06
 0:00:54
0:00:54
 0:00:51
0:00:51
 0:01:34
0:01:34