filmov
tv
PIR Motion Sensor with Arduino
Показать описание
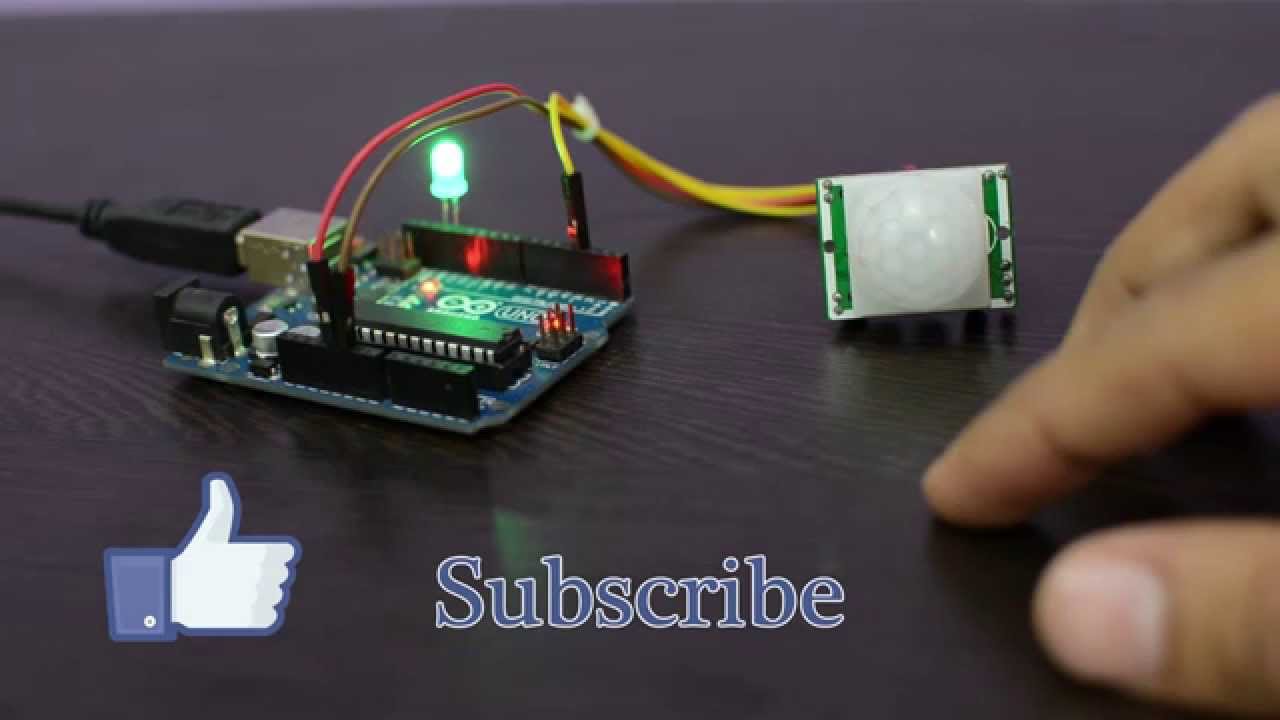
hello folks, this video about PIR Motion Sensor and Arduino. With this video, you will learn how to connect PIR sensor with Arduino and program the Arduino to detect any moment in the room or around the motion sensor.
To make this prototype I am using:-
Arduino UNO
PIR Motion Sensor
Jumper wire
Breadboard
PIR module Motion Sensor - Aliexpress
Arduino UNO - Aliexpress
Breadboard - Aliexpress
You can find the code on project page, below is the link:
To make this prototype I am using:-
Arduino UNO
PIR Motion Sensor
Jumper wire
Breadboard
PIR module Motion Sensor - Aliexpress
Arduino UNO - Aliexpress
Breadboard - Aliexpress
You can find the code on project page, below is the link:
 0:02:53
0:02:53
PIR Motion Sensor with Arduino
 0:05:35
0:05:35
How to use PIR Motion Sensor with Arduino | Motion sensor light
 0:00:27
0:00:27
PIR SB312A - Mini PIR Motion Sensor Arduino Test
 0:06:38
0:06:38
How to Use a PIR Sensor with Arduino (Lesson #26)
 0:06:03
0:06:03
PIR sensor HC SR501
 0:03:14
0:03:14
PIR Motion sensor with arduino| Motion Detector
 0:03:52
0:03:52
Arduino pir sensor led and buzzer code | pir motion sensor projects
 0:00:17
0:00:17
PIR motion sensor + Arduino + servo motor
 0:00:37
0:00:37
PIR SENSOR #chemistry #communication #education #gateelectronics #communicationtechnology #arduino
 0:00:33
0:00:33
Coolest Motion Sensor in Market- PIR HC-SR501 #arduino #arduinoprogramming #arduinoprojects
 0:04:32
0:04:32
How PIR Sensor Works and How To Use It with Arduino
 0:02:24
0:02:24
Arduino with PIR Motion Sensor
 0:02:14
0:02:14
ks0052 keyestudio PIR motion sensor module
 0:09:07
0:09:07
How to Use Passive Infrared Motion (PIR) Sensors on the Arduino - Ultimate Guide to the Arduino #35
 0:12:34
0:12:34
PIR Sensor Arduino Project | Motion Detector Arduino UNO | PIR Sensor Light Arduino
 0:00:59
0:00:59
PIr motion detector sensor & Arduino module unboxing. #shorts
 0:00:31
0:00:31
HC-SR312 AM312 PIR Sensor
 0:00:18
0:00:18
Arduino PIR motion sensor for IOT project 2022
 0:00:58
0:00:58
PIR MOTION SENSOR DISTANCE II WiFi Smart PIR Motion Sensor Human Detector#ytshorts #unboxing#arduino
 0:00:15
0:00:15
PIR Motion Sensor | Arduino PIR Motion Module | Best Motion Module For Arduino | #shorts #trending
 0:01:00
0:01:00
PIR Motion Sensor Passive Infrared Arduino.MOV
 0:25:20
0:25:20
Motion-activated Servo Motors with Arduino and PIR Sensor
 0:01:02
0:01:02
AUTOMATIC DOORBELL WITH PIR MOTION SENSOR
 0:03:26
0:03:26
Arduino PIR sensor tutorial
Комментарии