filmov
tv
Transfer Function to State Space

Показать описание
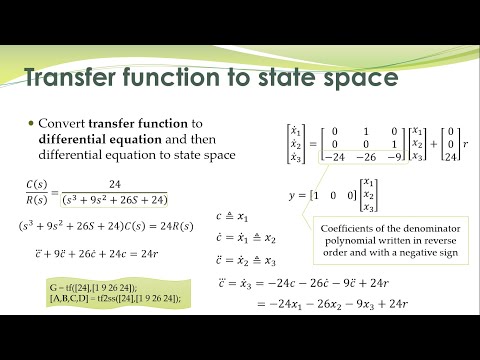
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as controllable canonical form, modal canonical form, and controller canonical form. We will apply this to an example and show how to use Matlab’s tf2ss function to help with this transformation. Finally, we use Simulink to show that all representations yield the same input/output relationship.
Topics and timestamps:
0:00 – Introduction
1:17 – Controllable canonical form
27:16 – Modal canonical form
41:11 – Other canonical forms via similarity transformations
51:07 – Controller canonical form via tf2ss
55:41 - Conclusions
#Matlab #Simulink
#Control #ControlTheory
Topics and timestamps:
0:00 – Introduction
1:17 – Controllable canonical form
27:16 – Modal canonical form
41:11 – Other canonical forms via similarity transformations
51:07 – Controller canonical form via tf2ss
55:41 - Conclusions
#Matlab #Simulink
#Control #ControlTheory
 0:07:49
0:07:49
Transfer Function to State Space Representation Example
 0:15:32
0:15:32
Transfer Function to State Space Equations: Solved Example
 0:06:48
0:06:48
Transfer Function to State Space - Controls
 0:10:57
0:10:57
Transfer function to state space with polynomial in numerator and denominator
 0:10:49
0:10:49
Intro to Control - 6.3 State-Space Model to Transfer Function
 0:04:44
0:04:44
transfer function to State Space example 2
 0:06:34
0:06:34
State Space Representation to Transfer Function Example
 0:06:34
0:06:34
transfer function to State Space
 0:07:53
0:07:53
LCS - 52a - State-space to transfer function
 0:14:43
0:14:43
Converting Transfer Functions into state space models
 0:38:28
0:38:28
Converting Transfer Function to State−Space | Case 1 | Control Systems | Kyrillos Refaat
 0:21:33
0:21:33
Transfer Function to State Space
 0:06:15
0:06:15
Transfer function to state space model
 0:56:53
0:56:53
Transfer Function to State Space
 0:24:33
0:24:33
LCS - 51 - Differential equation to state-space, transfer function to state-space, block diagrams
 0:07:39
0:07:39
Transfer function to state space to differential equation
 0:19:22
0:19:22
Converting from State Space to Transfer Function | State Space | Control Systems | Kyrillos Refaat
 0:09:49
0:09:49
Derivation of Transfer Function from State Model
 0:18:12
0:18:12
4 Ways to Implement a Transfer Function in Code | Control Systems in Practice
 0:01:54
0:01:54
Convert transfer function to state space MATLAB | control system transfer function and state space
 0:09:22
0:09:22
State Space Analysis to Determine Transfer Function
 0:14:12
0:14:12
Introduction to State-Space Equations | State Space, Part 1
 0:05:07
0:05:07
Converting from transfer function to state space representation 1
 0:09:27
0:09:27
Converting a Transfer Function to State-Space (Matrix) Form
Комментарии