filmov
tv
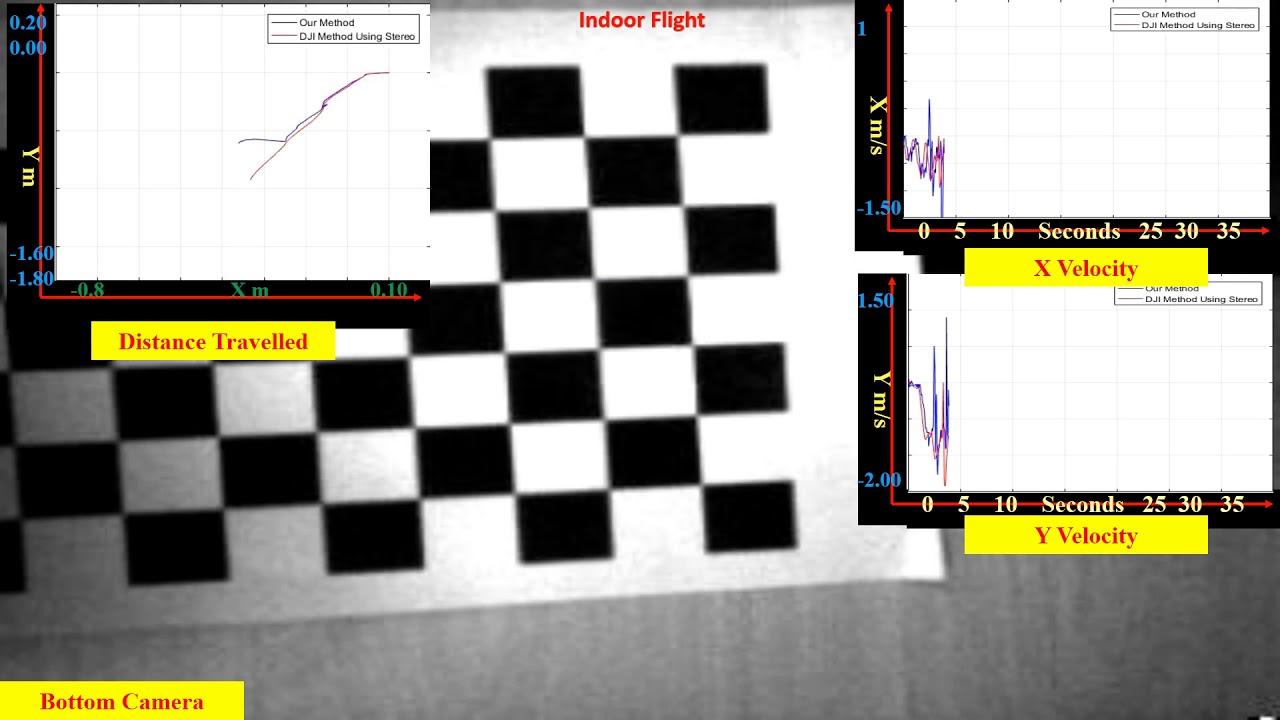
Velocity Estimation Using Monocular Camera Based on Conventional Techniques in Computer Vision
Показать описание
Estimating the velocity of a Quadcopter in GPS denied environments is one of the key challenges today. We have designed an algorithm to estimate velocity of a Quadcopter using a downward facing camera, IMU and Sonar using conventional image registration techniques. The results are demonstrated in this video for a series of experiments performed in different environments.
 0:06:08
0:06:08
 0:00:42
0:00:42
 0:07:48
0:07:48
 0:01:53
0:01:53
 0:00:15
0:00:15
 0:00:43
0:00:43
 0:00:55
0:00:55
 0:02:44
0:02:44
 0:11:22
0:11:22
 0:01:51
0:01:51
 0:00:07
0:00:07
 0:04:38
0:04:38
 0:02:24
0:02:24
 0:20:06
0:20:06
 0:05:42
0:05:42
 0:00:43
0:00:43
 0:07:57
0:07:57
 0:00:15
0:00:15
 0:01:00
0:01:00
 0:00:09
0:00:09
 0:22:01
0:22:01
 0:01:00
0:01:00
 0:00:47
0:00:47
 0:14:03
0:14:03