filmov
tv
OpenVINS Paper Presentation - ICRA 2020

Показать описание
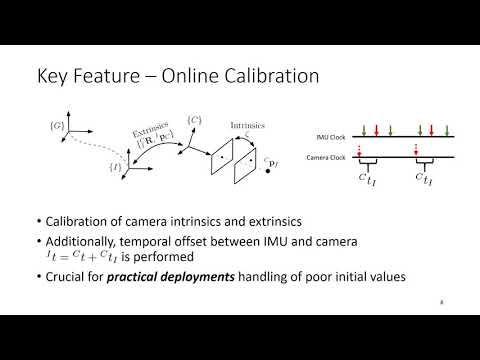
In this paper, we present an open platform, termed OpenVINS, for visual-inertial estimation research for both the academic community and practitioners from industry. The open sourced codebase provides a foundation for researchers and engineers to quickly start developing new capabilities for their visual-inertial systems. This codebase has out of the box support for commonly desired visual-inertial estimation features, which include: (i) on-manifold sliding window Kalman filter, (ii) online camera intrinsic and extrinsic calibration, (iii) camera to inertial sensor time offset calibration, (iv) SLAM landmarks with different representations and consistent First-Estimates Jacobian (FEJ) treatments, (v) modular type system for state management, (vi) extendable visual-inertial system simulator, and (vii) extensive toolbox for algorithm evaluation. Moreover, we have also focused on detailed documentation and theoretical derivations to support rapid development and research, which are greatly lacked in the current open sourced algorithms. Finally, we perform comprehensive validation of the proposed OpenVINS against state-of-the-art open sourced algorithms, showing its competing estimation performance.
Title: OpenVINS: A Research Platform for Visual-Inertial Estimation
Authors: Patrick Geneva, Kevin Eckenhoff, Woosik Lee, Yulin Yang, and Guoquan Huang
Title: OpenVINS: A Research Platform for Visual-Inertial Estimation
Authors: Patrick Geneva, Kevin Eckenhoff, Woosik Lee, Yulin Yang, and Guoquan Huang
 0:06:40
0:06:40
 0:09:59
0:09:59
 0:08:06
0:08:06
 0:00:24
0:00:24
![[ICRA 2021] Paper](https://i.ytimg.com/vi/FRWxJroI-vg/hqdefault.jpg) 0:08:16
0:08:16
 0:09:37
0:09:37
 0:09:43
0:09:43
 0:02:55
0:02:55
 0:52:07
0:52:07
![[ICRA 2020] TrueRMA:](https://i.ytimg.com/vi/G2La3xM7fEI/hqdefault.jpg) 0:10:00
0:10:00
 0:09:19
0:09:19
 0:01:31
0:01:31
 0:09:41
0:09:41
 0:12:31
0:12:31
 0:01:10
0:01:10
![[ICRA 2021] [Best](https://i.ytimg.com/vi/1qVyD-wqZO4/hqdefault.jpg) 0:14:25
0:14:25
 0:09:32
0:09:32
 0:13:22
0:13:22
 0:05:58
0:05:58
 0:03:57
0:03:57
![[ICRA 2020] ERT-based](https://i.ytimg.com/vi/MrTaEdncc4Y/hqdefault.jpg) 0:01:22
0:01:22
 0:09:35
0:09:35
 0:10:32
0:10:32
 0:14:57
0:14:57