filmov
tv
MATLAB & Simulink: open-loop system and PID control system

Показать описание
Using MATLAB and Simulink, the tutorial goes through the simulation of the following:
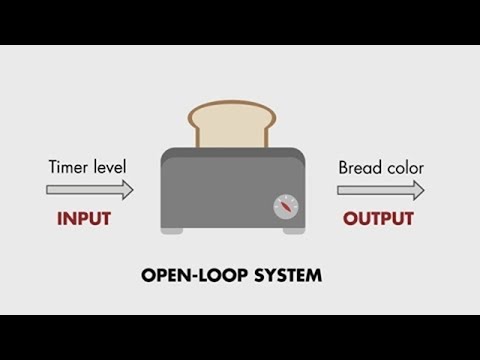
1. Open-loop system: use of step input, transfer function, scope and mux
2. Open-loop system with disturbance: use of summing junction for control feedback and the addition of a disturbance
3. Feedback PID control system: use of the PID controller block and tune button
1. Open-loop system: use of step input, transfer function, scope and mux
2. Open-loop system with disturbance: use of summing junction for control feedback and the addition of a disturbance
3. Feedback PID control system: use of the PID controller block and tune button
 0:08:41
0:08:41
MATLAB & Simulink: open-loop system and PID control system
 0:14:34
0:14:34
Introduction to Simulink: Open Loop System and Closed Loop Control System
 0:05:10
0:05:10
Open Loop Control System Using MATLAB Simulink #04 | Basics | Paramjeet Singh Jamwal | INFO4EEE
 0:05:37
0:05:37
Open Loop Control Using MATLAB Simulink #003
 0:05:46
0:05:46
Open-Loop Control Systems | Understanding Control Systems, Part 1
 0:12:58
0:12:58
Simulation of open loop & closed loop control system||MATLAB||simulink
 0:06:39
0:06:39
Open-loop System in Simulink/Matlab [Hindi] - MATLAB Tutorial
 0:00:28
0:00:28
Demo: Open loop control for DC motor ( Matlab Simulink and Arduino)
 0:10:45
0:10:45
Open loop control simulation of dc-dc boost converter in MATLAB/Simulink
 0:26:28
0:26:28
Open Loop and Closed Loop Simulation of BUCK Converter in MATLAB.
 0:03:35
0:03:35
Simulation of open loop control DC-DC Ćuk Converter in MATLAB Simulink
 0:14:08
0:14:08
Simulink Matlab How to Make the State Space Simulation Control for Open Loop and Closed Loop System
 0:05:57
0:05:57
Open Loop DC motor working in Simulink|MATLAB|DEEP MATRIX
 0:18:35
0:18:35
Single Phase Inverter Design & Open loop Simulation in MATLAB.
 0:46:20
0:46:20
Open Loop Control System & Closed Loop Control System using MATLAB Simulation
 0:05:52
0:05:52
Design and Simulation of Buck Converter for open loop || MATLAB SIMULINK
 0:08:31
0:08:31
MATLAB simulation on DC-DC buck converter | Open-Loop Operation
 0:18:07
0:18:07
1_FirstLab_Open-Loop_and Closed-Loop Control System Using MATLAB Simulink
 0:09:39
0:09:39
How to Make State Space Simulation in Simulink Matlab DC Motor System (Open Loop Simulation)
 0:09:59
0:09:59
MATLAB simulation on open loop control of dc dc boost converter
 0:05:01
0:05:01
Open loop first order system using Matlab simulink
 0:10:24
0:10:24
Single phase open loop inverter using MATLAB/SIMULINK
 0:04:48
0:04:48
Closed loop system design using Simulink|MATLAB|DEEP MATRIX
 0:06:37
0:06:37
Design and Simulation of open loop Control DC-DC Flyback Converter in MATLAB Simulink
Комментарии