filmov
tv
Differential Equations Lec 31 (Class 34), Hyperbolicity, Stability, Hamiltonian & Lyapunov Functions

Показать описание
Differential Equations Course, Lecture 31. (0:00) Encouragement to pay attention and take notes for subtle things in this lecture and mention one more reading assignment. (0:57) Review hyperbolic equilibrium points and Hartman-Grobman theorem (linearization). (4:32) Comments about hyperbolic equilibrium points being structurally stable. (5:46) Lyapunov stable and unstable equilibrium points. Draw pictures to help understand the definitions. (18:24) Physical importance of stable versus unstable equilibrium points. Relate it to the pendulum and competing species models. (21:40) Hamiltonian systems and the ideal (undamped) pendulum. (23:25) Basic consequences of the nonlinearity, small-angle linear approximation, and solution curves in the phase plane. (28:57) Find the Hamiltonian function for the ideal pendulum (correction from the end of Class #33 (Lecture #30)) and graph the level curves with ContourPlot along with solution curves on top of the level curves. (36:34) Construct a Hamiltonian system by starting with the Hamiltonian function and then study the resulting system. (42:39) Saddles and centers are the only kinds of nondegenerate equilibrium points that can occur in Hamiltonian systems. (43:19) Adding friction to the pendulum model results in a dissipative system. The old Hamiltonian function for the system without friction now becomes a Lyapunov function for the system with friction. (43:54) Comment about the possibility of doing an experiment as part of the project as a way of getting more points. (44:27) The corresponding system. (44:57) See solutions in the phase plane and how they move from higher to lower values of the Lyapunov function. (48:18) Confirm symbolically with the Chain Rule that the Lyapunov function decreases along solution curves.
AMAZON ASSOCIATE
As an Amazon Associate I earn from qualifying purchases.
 0:52:09
0:52:09
Differential Equations Lec 31 (Class 34), Hyperbolicity, Stability, Hamiltonian & Lyapunov Funct...
 0:33:58
0:33:58
Differential Equations || Lec 55 || Ex: 4.7: Q31 - 35 || Cauchy's Euler Differential Equations
 0:05:30
0:05:30
Differential Equations || Lec 30 || Ex: 4.1, Q 31 || Verification of a General solution
 1:15:27
1:15:27
Engineering Mathematics | Differential Equation - 5 | Lec 31 | GATE 2021 Crash Course
 0:08:20
0:08:20
Differential Equations || Lec 31 || Ex: 5.1: Q :- 3 || Free Undamped Motion, Spring Mass System
 0:48:01
0:48:01
Lec 31: Differential Equations of Equilibrium in Cylindrical shell using membrane hypothesis
 0:13:57
0:13:57
Differential Equations || Lec 15 || Exercise No 2.3: Q 31
 1:30:23
1:30:23
Lec-31 (Differential equation) Basic Mathematics (JC223), JNCASR, IISC
 0:32:40
0:32:40
Lec 31 Semi-group arising from the heat equation
 0:59:39
0:59:39
Engineering Mathematics | Lec 31 | Differential Equation: Solution of Differential Equation - 12
 0:06:16
0:06:16
DIFFERENTIAL EQUATIONS (LEC-31)(SEM-2)(B.SC/B.TECH/B.E)#sachinchandra#(9693967379)
 0:13:15
0:13:15
Differential Equations || Lec 31 || Ex: 4.2 || Formula for Reduction of Order, 2nd Solution
 0:26:56
0:26:56
MTH-401 Differential Equations Lec#31,,, after grand quiz 8th lecture
 0:54:05
0:54:05
Mod-06 Lec-31 Stability Equilibrium Points Continued I
 0:39:35
0:39:35
Differential Equation(lec-31) Important Questions Of 12th
 0:23:51
0:23:51
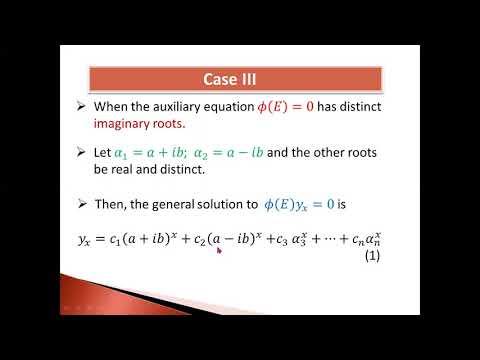
Linear Homogeneous Difference Equations with Constant Coefficients (Lec#31)
 0:29:15
0:29:15
Lec 31
 0:51:43
0:51:43
Diff Eqs Lec #30, Hyperbolic Equilibria, Hamiltonian Systems, Pendulum
 0:20:16
0:20:16
Differential Equations || Lec 67 || Ex: 5.1: Q 29, 30 || Spring Mass System with Driven Force
 0:05:43
0:05:43
Differential Equations Lec 9
 0:53:52
0:53:52
partial differential equation lec no 31
 2:03:46
2:03:46
Lec 2 : Introduction to Partial Differential equations
 0:15:53
0:15:53
Competitive Mathematics | 31 JULY 2022 | Differential equation | Lec - 61
 0:31:10
0:31:10
Lec 31 Unidirectional transport. Common form of transport equations
Комментарии