filmov
tv
#AGV #algorithm #Robot #Robotics #minimum jerk Auto charging algorithm for smart AGV

Показать описание
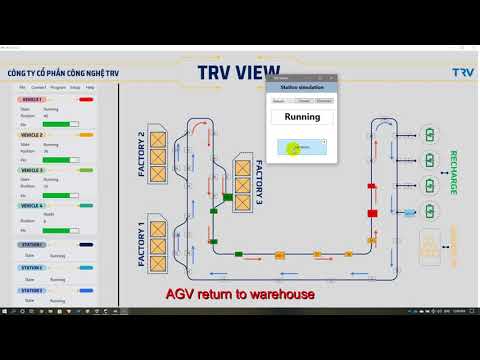
Sạc tự động là một tính năng quan trọng của AGV. Nó giúp đảm bảo quá trình làm việc liên tục của hệ thống nhiều robot. Để quá trình sạc tự động được diễn ra hiệu quả thì việc di chuyển chính xác cả về vị trí và hướng của tiếp điểm sạc là một việc rất quan trọng.
Như chúng ta đã biết, AGV dạng dùng 2 bánh chủ động tuy có nhiều ưu điểm nhưng nhược điểm là không thể cùng lúc đảm bảo cả về thông số vị trí và hướng. Đây là một hệ "hụt dẫn động" khi mà chỉ có thể điều khiển đồng thời 2 động cơ chủ động nhưng phải đảm bảo 3 giá trị về vị trí x,y,phi như vậy về mặt điều khiển ta có hệ 3 ẩn nhưng thiếu 1 phương trình. Do đó cần phải có một thuật toán đảm bảo quá trình giải nghiệm là 1: 1 để đảm bảo quá trình di chuyển chính xác đảm bảo cả về hướng và vị trí của robot tại vị trí sạc.
Trên đây là video kết quả của quá trình áp dụng phương pháp chuyển đổi thuật toán di chuyển để đảm bảo di chuyển chính xác vị trí (x,y) và hướng (phi) tại vị trí sạc cho hệ robot hụt dẫn động.
Như chúng ta đã biết, AGV dạng dùng 2 bánh chủ động tuy có nhiều ưu điểm nhưng nhược điểm là không thể cùng lúc đảm bảo cả về thông số vị trí và hướng. Đây là một hệ "hụt dẫn động" khi mà chỉ có thể điều khiển đồng thời 2 động cơ chủ động nhưng phải đảm bảo 3 giá trị về vị trí x,y,phi như vậy về mặt điều khiển ta có hệ 3 ẩn nhưng thiếu 1 phương trình. Do đó cần phải có một thuật toán đảm bảo quá trình giải nghiệm là 1: 1 để đảm bảo quá trình di chuyển chính xác đảm bảo cả về hướng và vị trí của robot tại vị trí sạc.
Trên đây là video kết quả của quá trình áp dụng phương pháp chuyển đổi thuật toán di chuyển để đảm bảo di chuyển chính xác vị trí (x,y) và hướng (phi) tại vị trí sạc cho hệ robot hụt dẫn động.
 0:00:20
0:00:20
 0:06:47
0:06:47
 0:01:11
0:01:11
 0:00:46
0:00:46
 0:01:20
0:01:20
 0:01:34
0:01:34
 0:02:19
0:02:19
 0:02:52
0:02:52
 0:01:13
0:01:13
 0:00:16
0:00:16
 0:04:26
0:04:26
 0:00:15
0:00:15
 0:00:11
0:00:11
 0:00:30
0:00:30
 0:00:21
0:00:21
 0:01:37
0:01:37
 0:00:57
0:00:57
 0:01:02
0:01:02
 0:06:47
0:06:47
 0:01:14
0:01:14
 0:00:06
0:00:06
 0:00:21
0:00:21
 0:00:11
0:00:11
 0:00:33
0:00:33