filmov
tv
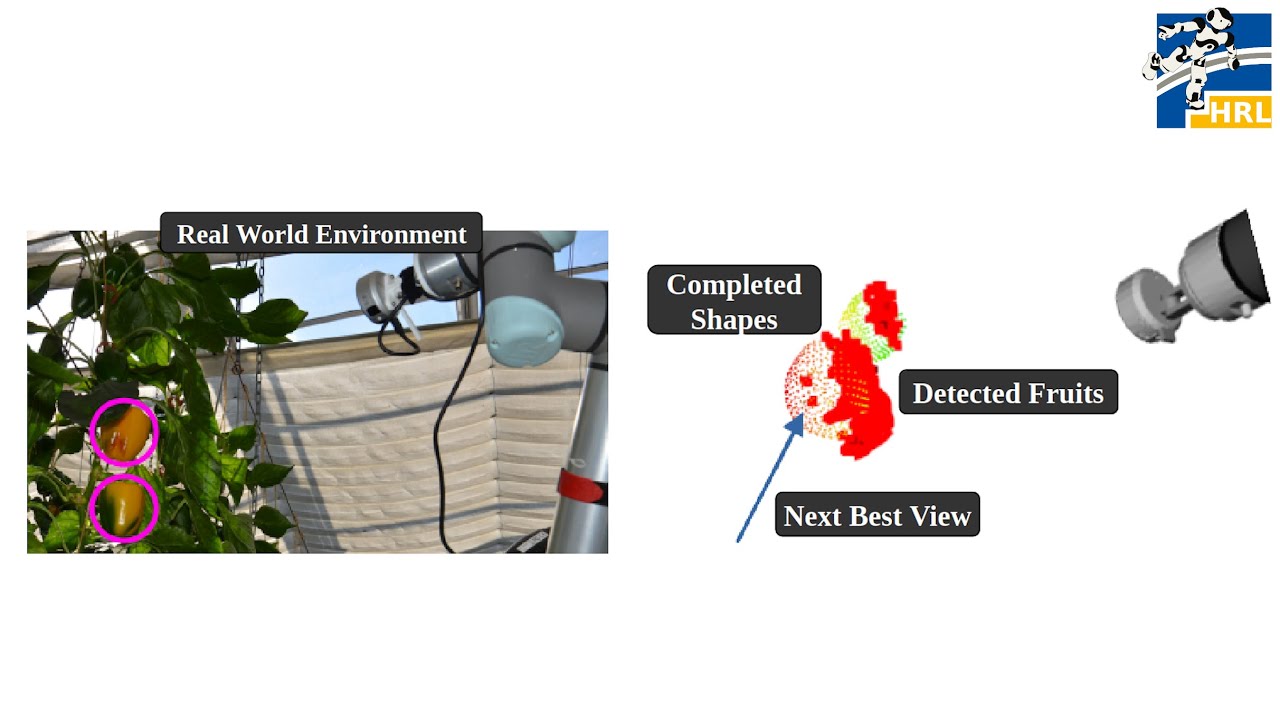
NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction
Показать описание
This video demonstrates the work presented in our paper "NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction" by R. Menon, T. Zaenker, N. Dengler and M. Bennewitz, submitted to the International Conference on Intelligent Robots and Systems (IROS), 2023.
State-of-the-art viewpoint planning approaches utilize computationally expensive ray casting operations to find the next best viewpoint. In our paper, we present a novel viewpoint planning approach that explicitly uses information about the predicted fruit shapes to compute targeted viewpoints that observe as yet unobserved parts of the fruits. Furthermore, we formulate the concept of viewpoint dissimilarity to reduce the sampling space for more efficient selection of useful, dissimilar viewpoints. In comparative experiments with a state-of-the-art viewpoint planner, we demonstrate improvement not only in the estimation of the fruit sizes, but also in their reconstruction, while significantly reducing the planning time. Finally, we show the viability of our approach for mapping sweet peppers plants with a real robotic system in a commercial glasshouse.
State-of-the-art viewpoint planning approaches utilize computationally expensive ray casting operations to find the next best viewpoint. In our paper, we present a novel viewpoint planning approach that explicitly uses information about the predicted fruit shapes to compute targeted viewpoints that observe as yet unobserved parts of the fruits. Furthermore, we formulate the concept of viewpoint dissimilarity to reduce the sampling space for more efficient selection of useful, dissimilar viewpoints. In comparative experiments with a state-of-the-art viewpoint planner, we demonstrate improvement not only in the estimation of the fruit sizes, but also in their reconstruction, while significantly reducing the planning time. Finally, we show the viability of our approach for mapping sweet peppers plants with a real robotic system in a commercial glasshouse.
 0:01:01
0:01:01
 0:04:43
0:04:43
 0:01:00
0:01:00
 0:01:06
0:01:06
 0:01:37
0:01:37
 0:01:31
0:01:31
 0:02:50
0:02:50
 0:02:24
0:02:24
 0:38:03
0:38:03
 0:02:56
0:02:56
 0:11:01
0:11:01
 0:02:01
0:02:01
 0:00:58
0:00:58
 0:03:00
0:03:00
 0:02:04
0:02:04
![[RA-L2023]Active Implicit Object](https://i.ytimg.com/vi/qKmFzIE4-C0/hqdefault.jpg) 0:03:12
0:03:12
 0:03:56
0:03:56
 0:01:01
0:01:01
 0:55:16
0:55:16
 0:03:10
0:03:10
 0:03:00
0:03:00
 1:05:24
1:05:24
 0:02:10
0:02:10
 0:11:04
0:11:04