filmov
tv
A Co-Simulation Middleware: Virtual Testing of Automotive Applications with Multiple Simulators
Показать описание
Technical presentation: Virtual environments have become essential for testing and developing connected and autonomous driving functions. Although various well-established, openly available simulation software programs already exist, they are limited to specific applications.
To overcome this issue and benefit from the strengths of the individual tools, they are often coupled with each other. To this day, such frameworks are still seldom released as open source and presented methods are designed for specific use cases.
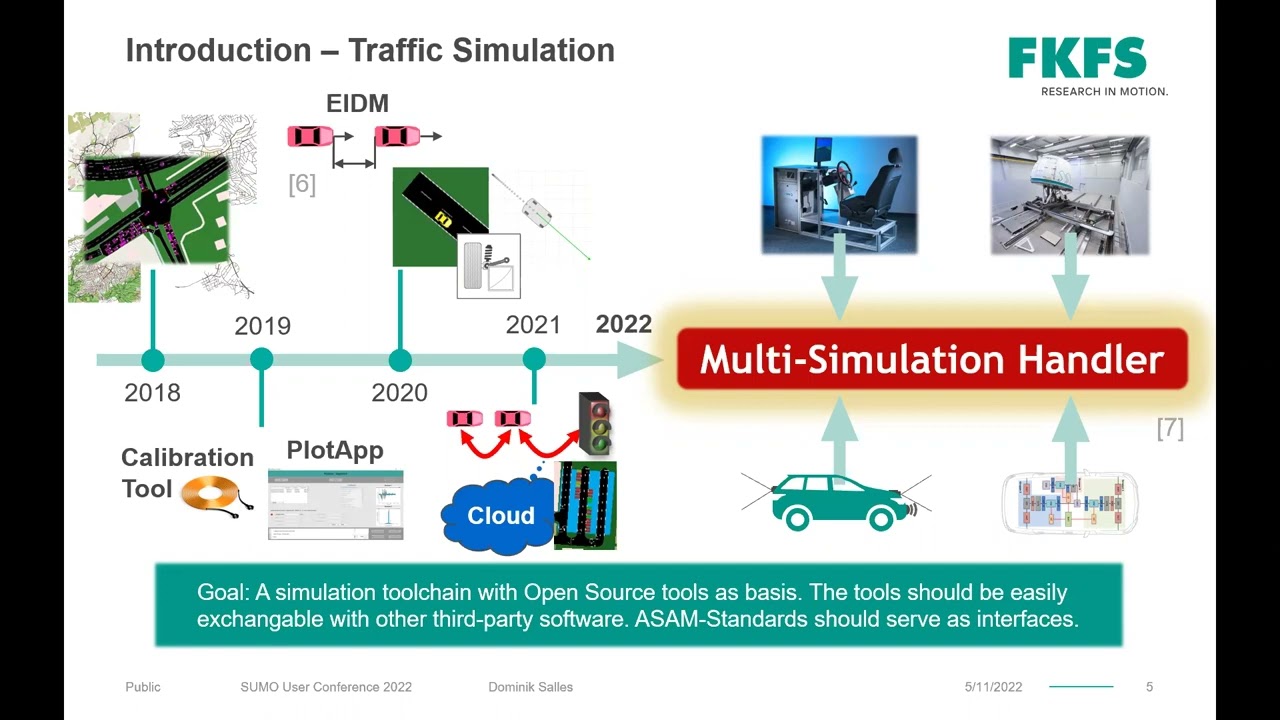
The concepts often miss modular concepts and interfaces for standardized formats. We therefore built a modular co-simulation framework based on widespread open source software and commonly used automotive standards. It consists of a C++ Run-Time Interface, which connects multiple simulators and programs together via customized interfaces, e.g. Carla, SUMO, VTD, CarMaker.
The middleware uses its own high-level definition of dynamic objects, e.g. of vehicles, pedestrians, traffic lights and other miscellaneous objects. We use OpenScenario catalogs for the internal representation of the objects and OpenDrive for the street description.
Simulation and sensor data is saved or transferred in standardized formats, such as Measurement Data Format (MDF), Open Simulation Interface (OSI), Portable Network Graphics (PNG) and Point Cloud Data (PCD). Depending on the use case, the toolchain is also able to run in soft real time or faster than real time. The main benefit of this modular toolchain is that each interface only needs to be built once, not separately for every tool combination.
To overcome this issue and benefit from the strengths of the individual tools, they are often coupled with each other. To this day, such frameworks are still seldom released as open source and presented methods are designed for specific use cases.
The concepts often miss modular concepts and interfaces for standardized formats. We therefore built a modular co-simulation framework based on widespread open source software and commonly used automotive standards. It consists of a C++ Run-Time Interface, which connects multiple simulators and programs together via customized interfaces, e.g. Carla, SUMO, VTD, CarMaker.
The middleware uses its own high-level definition of dynamic objects, e.g. of vehicles, pedestrians, traffic lights and other miscellaneous objects. We use OpenScenario catalogs for the internal representation of the objects and OpenDrive for the street description.
Simulation and sensor data is saved or transferred in standardized formats, such as Measurement Data Format (MDF), Open Simulation Interface (OSI), Portable Network Graphics (PNG) and Point Cloud Data (PCD). Depending on the use case, the toolchain is also able to run in soft real time or faster than real time. The main benefit of this modular toolchain is that each interface only needs to be built once, not separately for every tool combination.
 0:17:04
0:17:04
 0:23:46
0:23:46
 0:00:20
0:00:20
 0:07:48
0:07:48
 0:10:21
0:10:21
 0:02:07
0:02:07
 0:03:10
0:03:10
 0:01:01
0:01:01
 0:17:00
0:17:00
 0:22:02
0:22:02
 0:07:33
0:07:33
 0:04:05
0:04:05
 0:18:25
0:18:25
 0:56:01
0:56:01
 0:01:11
0:01:11
 0:01:41
0:01:41
 0:11:38
0:11:38
 0:03:20
0:03:20
 0:27:46
0:27:46
 0:00:34
0:00:34
 0:23:33
0:23:33
 0:03:34
0:03:34
 0:04:01
0:04:01
 0:05:17
0:05:17