filmov
tv
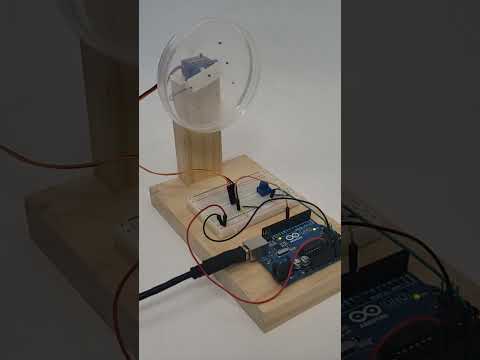
Amazing invention. Arduino project. Experiment Lab

Показать описание
@experiment_lab_bd
Components:
Arduino Uno
HC-SR04 Ultrasonic Sensor
Servo Motor (e.g., SG90)
Jumper wires
Wiring:
Connect the Sonar Sensor:
Connect the VCC pin of the sonar sensor to the 5V output on the Arduino.
Connect the GND pin of the sonar sensor to the GND on the Arduino.
Connect the TRIG pin of the sonar sensor to digital pin 2 on the Arduino.
Connect the ECHO pin of the sonar sensor to digital pin 3 on the Arduino.
Connect the Servo Motor:
Connect the red (power) wire of the servo to the 5V output on the Arduino.
Connect the brown (ground) wire of the servo to the GND on the Arduino.
Connect the orange (signal) wire of the servo to digital pin 9 on the Arduino.
Power Supply:
Connect the Arduino Uno to your computer using a USB cable for power.
Your hardware setup should now be ready. Make sure your components are powered properly, and upload the provided Arduino code to your Arduino Uno using the Arduino IDE. The code will control the servo based on the distance measured by the sonar sensor.
Code:
Check 1st comment to get code.
Subscribe our channel to get more videos.
Thanks❤
Components:
Arduino Uno
HC-SR04 Ultrasonic Sensor
Servo Motor (e.g., SG90)
Jumper wires
Wiring:
Connect the Sonar Sensor:
Connect the VCC pin of the sonar sensor to the 5V output on the Arduino.
Connect the GND pin of the sonar sensor to the GND on the Arduino.
Connect the TRIG pin of the sonar sensor to digital pin 2 on the Arduino.
Connect the ECHO pin of the sonar sensor to digital pin 3 on the Arduino.
Connect the Servo Motor:
Connect the red (power) wire of the servo to the 5V output on the Arduino.
Connect the brown (ground) wire of the servo to the GND on the Arduino.
Connect the orange (signal) wire of the servo to digital pin 9 on the Arduino.
Power Supply:
Connect the Arduino Uno to your computer using a USB cable for power.
Your hardware setup should now be ready. Make sure your components are powered properly, and upload the provided Arduino code to your Arduino Uno using the Arduino IDE. The code will control the servo based on the distance measured by the sonar sensor.
Code:
Check 1st comment to get code.
Subscribe our channel to get more videos.
Thanks❤
 0:00:16
0:00:16
Arduino project how to make a laser electronic alarm, an amazing invention DIY
 0:01:00
0:01:00
Amazing invention. Arduino project. Experiment Lab
 0:00:50
0:00:50
8 Cool Arduino Science Projects
 0:01:00
0:01:00
I built a “friendly” fly trap 💀 #electronics #arduino #engineering
 0:00:17
0:00:17
Top 5 Arduino Projects for Beginners. Full tutorial videos in Youtube Channel #arduino
 0:00:17
0:00:17
What Doing Electronics Projects is Really Like 💀 #electronics #arduino #engineering
 0:00:21
0:00:21
Probably The Greatest Invention of All Time 💀 #electronics #engineering #arduino
 0:00:22
0:00:22
What engineering students actually do in labs 💀 #electronics #arduino #engineering
 0:05:14
0:05:14
Make a 2 IN 1 Power Bank // How To Make A Power Bank at home
 0:00:17
0:00:17
When The Quiet Kid Does Your Homework 💀 #electronics #arduino #engineering
 0:02:16
0:02:16
8 Cool Arduino Science Projects
 0:01:05
0:01:05
Air Defense System- DIY Arduino Project - The X Lab
 0:00:38
0:00:38
Arduino Missile Defense Radar System in ACTION
 0:07:38
0:07:38
12 Best Arduino Projects for Beginners in 2024!
 0:07:10
0:07:10
Top 10 Arduino Projects 2018 | Amazing Ardiuno School Projects
 0:04:04
0:04:04
Top 10 arduino projects 2024 | Arduino projects for beginners | Arduino project
 0:09:24
0:09:24
Top 10 Arduino Projects 2020 | Awesome Idea for winning Science Project
 0:00:16
0:00:16
✌🏻How Smart Dustbin Work Using Ultrasonic sensor Arduino & servo motor🔭Science Exhibition projec...
 0:00:13
0:00:13
Arduino based automatic water tap usingultra sonic sensor and micro servo
 0:00:13
0:00:13
NEVER buy this JOYSTICK! #electronics #engineering #arduino
 0:06:10
0:06:10
13 Great Arduino Project Ideas for Beginners!!!
 0:03:37
0:03:37
Arduino project how to make a laser electronic alarm, an amazing invention DIY
 0:00:40
0:00:40
Arduino project 😎^ Arduino #arduino #2022 #2021 #2023 #dc #arduinoproject #diy #foryou
 0:00:19
0:00:19
DIY Radar With Ultrasonic Sensor And Chat-GPT Generated Arduino Code | Coders Cafe
Комментарии