filmov
tv
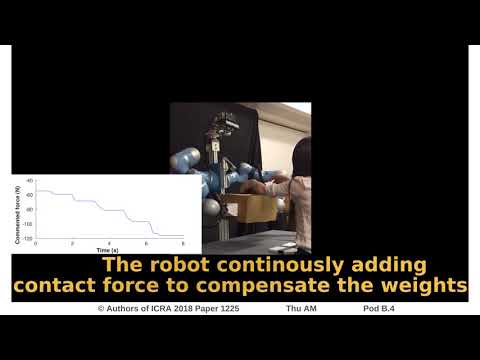
Multi-Priority Cartesian Impedance Control Based on Quadratic Programming Optimization

Показать описание
by Enrico Mingo Hoffman, Arturo Laurenzi, Luca Muratore, Nikos G. Tsagarakis and Darwin G. Caldwell
-- Humanoids and Human Centered Mechatronics Lab (HHCM), Istituto Italiano di Tecnologia (IIT)
In this work, we introduced a prioritized Cartesian impedance control under the framework of the Quadratic Programming (QP) optimization. In particular, we present a formulation that is simpler than full inverse dynamics, avoids any matrix pseudo-inversion, inverse kinematics computation, and considers strict priorities among tasks. Our formulation is based on QP optimization permitting to take into account also explicit inequality constraints. We compare in simulation the tracking results obtained with a classical algebraic implementation against those derived from the proposed QP implementation taking into account joint torque limits. We consider the classical Cartesian impedance controller and a simplified version, also known as Virtual Model Control. Finally, the proposed method was implemented and validated on a humanoid upper-body torque-controlled robot. Experimental trials involving various physical interaction conditions were executed to demonstrate the performance of the proposed method.
Published in: 2018 IEEE International Conference on Robotics and Automation (ICRA)
-- Humanoids and Human Centered Mechatronics Lab (HHCM), Istituto Italiano di Tecnologia (IIT)
In this work, we introduced a prioritized Cartesian impedance control under the framework of the Quadratic Programming (QP) optimization. In particular, we present a formulation that is simpler than full inverse dynamics, avoids any matrix pseudo-inversion, inverse kinematics computation, and considers strict priorities among tasks. Our formulation is based on QP optimization permitting to take into account also explicit inequality constraints. We compare in simulation the tracking results obtained with a classical algebraic implementation against those derived from the proposed QP implementation taking into account joint torque limits. We consider the classical Cartesian impedance controller and a simplified version, also known as Virtual Model Control. Finally, the proposed method was implemented and validated on a humanoid upper-body torque-controlled robot. Experimental trials involving various physical interaction conditions were executed to demonstrate the performance of the proposed method.
Published in: 2018 IEEE International Conference on Robotics and Automation (ICRA)
 0:01:37
0:01:37
 0:02:47
0:02:47
 0:01:10
0:01:10
 0:01:10
0:01:10
 0:02:28
0:02:28
 0:01:26
0:01:26
![[PongBot-Q] impedance control](https://i.ytimg.com/vi/aBWI2dau2x0/hqdefault.jpg) 0:00:18
0:00:18
 0:02:30
0:02:30
 0:00:45
0:00:45
 0:01:29
0:01:29
 0:04:29
0:04:29
 0:01:16
0:01:16
 0:01:43
0:01:43
 0:01:08
0:01:08
 0:13:01
0:13:01
 0:00:30
0:00:30
 0:00:43
0:00:43
 0:00:30
0:00:30
 0:02:58
0:02:58
 0:02:25
0:02:25
 0:02:25
0:02:25
 0:01:04
0:01:04
 0:10:00
0:10:00
 0:03:14
0:03:14