filmov
tv
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Details (3)
Показать описание
Calibration basics, min/max calibration, azimuth calculation …
↓↓↓ Complete description, time index and links below ↓↓↓
In part 2 (link below) we read every bit of raw data, respectively, status information the QMC5883L provides and used its interrupt pin instead of just polling the data in fixed intervals. We’re ready now to do something useful with that data.
As we learned in “The Basics” (link below) you need to calibrate your 3-axis magnetometer. So we start with some calibration theory and implement a simple calibration method. And in the end we calculate a compass direction (azimuth).
00:00 Intro – calibration and azimuth calculation
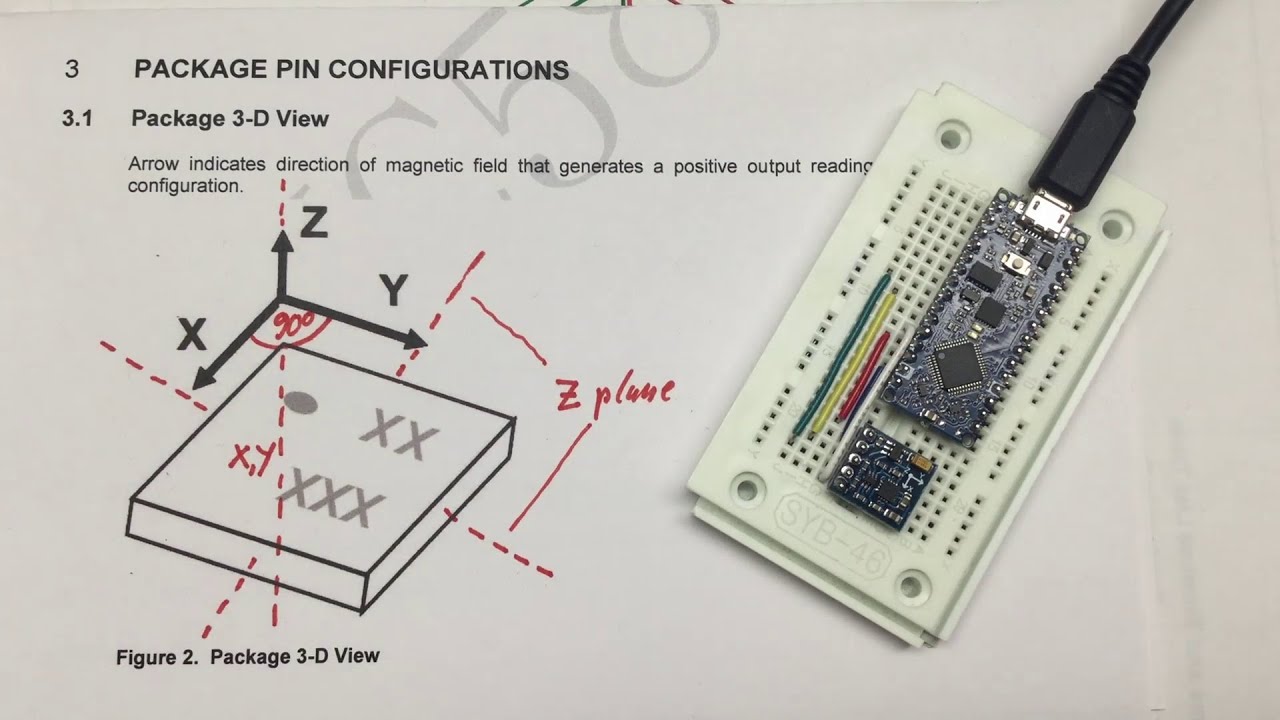
00:48 Axes revisited – three orthogonal magnetic sensors
03:18 Why calibration – sensor, hard iron and soft iron errors
06:28 Goal of calibration – a certain flux creating a perfect sphere
08:46 Correction matrix – sophisticated calibration, hard to do
11:47 Scaled biases – an easier, good enough way to calibrate
14:00 Fourth version – scaled biases calibration for X, Y and Z values
19:03 Experiments – underwhelming for 3 axes, kinda usable for 1
23:30 Azimuth calculation – two values, trigonometry and arctan2
31:37 Fifth version – compass direction around Z-axis (up and down)
35:00 Wrap-up – we’ll have to revisit the correction matrix, bye
#arduino #compass #magnetometer #i2c #microcontroller #tutorials #tutorial #how-to #robertssmorgasbord
↓↓↓ Complete description, time index and links below ↓↓↓
In part 2 (link below) we read every bit of raw data, respectively, status information the QMC5883L provides and used its interrupt pin instead of just polling the data in fixed intervals. We’re ready now to do something useful with that data.
As we learned in “The Basics” (link below) you need to calibrate your 3-axis magnetometer. So we start with some calibration theory and implement a simple calibration method. And in the end we calculate a compass direction (azimuth).
00:00 Intro – calibration and azimuth calculation
00:48 Axes revisited – three orthogonal magnetic sensors
03:18 Why calibration – sensor, hard iron and soft iron errors
06:28 Goal of calibration – a certain flux creating a perfect sphere
08:46 Correction matrix – sophisticated calibration, hard to do
11:47 Scaled biases – an easier, good enough way to calibrate
14:00 Fourth version – scaled biases calibration for X, Y and Z values
19:03 Experiments – underwhelming for 3 axes, kinda usable for 1
23:30 Azimuth calculation – two values, trigonometry and arctan2
31:37 Fifth version – compass direction around Z-axis (up and down)
35:00 Wrap-up – we’ll have to revisit the correction matrix, bye
#arduino #compass #magnetometer #i2c #microcontroller #tutorials #tutorial #how-to #robertssmorgasbord
 0:23:59
0:23:59
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Basics
 0:35:48
0:35:48
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Details (3)
 0:21:30
0:21:30
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Details (4)
 0:29:10
0:29:10
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Details (1)
 0:38:39
0:38:39
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Details (5)
 0:26:12
0:26:12
QST QMC5883L 3-Axis Digital Compass and Arduino MCU – The Details (2)
 0:00:11
0:00:11
How to design a digital compass using Arduino and an HMC5883L magnetometer
 0:05:43
0:05:43
How to easily use HMC5883L Compass Sensor
 0:15:40
0:15:40
Mailbag: QMC5883L 3-Axis Compass Module (Schematic, Tests, Arduino Library)
 0:00:11
0:00:11
Compass application using HMC5883L magnetometer | Project by lokesh chandak
 0:20:00
0:20:00
MEMSIC MMC5983MA 3-Axis Digital Compass & Arduino MCU – The Details (8)
 0:25:53
0:25:53
MEMSIC MMC5983MA 3 Axis Digital Compass & Arduino MCU – The Basics
 0:00:45
0:00:45
QMC5883 Digital Compass Demo
 0:17:09
0:17:09
MEMSIC MMC5983MA 3-Axis Digital Compass & Arduino MCU – The Details (9)
 0:33:00
0:33:00
MEMSIC MMC5983MA 3-Axis Digital Compass & Arduino MCU – The Details (1)
 0:00:50
0:00:50
Presentation of Compass HMC5883L
 0:00:50
0:00:50
How to Calibrate a Magnetometer (Digital Compass GY-271) #shorts
 0:00:24
0:00:24
Triple Axis Magnetometer HMC5883L interfacing to PIC and ATmel
 0:00:43
0:00:43
Digital Compass Meter using Arduino
 0:00:14
0:00:14
Arduino HMC5883L Compass Sensor with Servo Motor #shorts
 0:00:23
0:00:23
JY-RM3100 Serial 3-axis Electronic Compass, Military-Grade PNI Magnetometer Heading Angle (old)
 0:00:43
0:00:43
HMC5883L Compass + Arduino + Processing
 0:06:13
0:06:13
Stm32 QMC5883(HMC5883L) Interface Tutorial - Digital compass
 0:00:26
0:00:26
DC motor control with HMC5883L 3-axis magnetometer
Комментарии