filmov
tv
How To Filter Signals In Arduino [Arduino Basics Tutorial 9]

Показать описание
In this tutorial i'm going to show you how to filter signals in arduino. But first i'm going to show you a high level overview of this whole radar project (which i should've done much more earlier). So first i will show you the simplest filtering method which is the running average. Then we will implement a much better way of filtering, which is a low-pass or high-pass filter (depending on how you chose your filter value). Finally i will show you a better driving method for the stepper motor.
This tutorial series will be about the basics of Arduino, using sensors, motors, programming, electronics and some more advanced concepts, and projects.
Code:
The kits I use in this series:
Kit with an Arduino Mega:
Kit with an Arduino Uno:
Extra parts you will need for the radar:
...and access to a 3D printer.
__________________________________
► Music by: Jay Man (OurMusicBox)
Thanks for watching!
#Arduino #ArduinoTutorial #NGH
This tutorial series will be about the basics of Arduino, using sensors, motors, programming, electronics and some more advanced concepts, and projects.
Code:
The kits I use in this series:
Kit with an Arduino Mega:
Kit with an Arduino Uno:
Extra parts you will need for the radar:
...and access to a 3D printer.
__________________________________
► Music by: Jay Man (OurMusicBox)
Thanks for watching!
#Arduino #ArduinoTutorial #NGH
 0:18:28
0:18:28
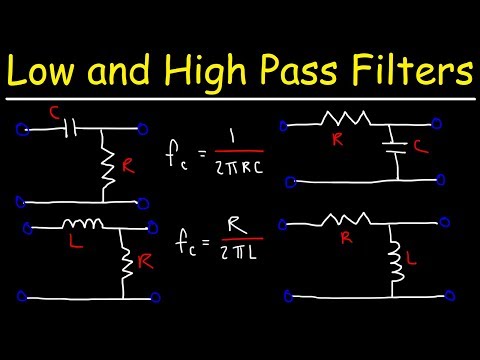
Low Pass Filters and High Pass Filters - RC and RL Circuits
 0:13:09
0:13:09
How To Filter Signals In Arduino [Arduino Basics Tutorial 9]
 0:00:40
0:00:40
How to filter analog signals in PLC (Codesys)
 0:13:55
0:13:55
Frequency domain – tutorial 3: filtering (periodic signals)
 0:03:28
0:03:28
How To Filter LuxAlgo Signals **Best Setting**
 0:51:48
0:51:48
Filtering for Dynamic Signals; Part I
 0:20:31
0:20:31
Designing Digital Filters with MATLAB
 0:07:22
0:07:22
This Indicator Filters Out 99% Of False Signals - Williams Alligator
 0:32:13
0:32:13
Signal Analysis Made Easy
 0:17:55
0:17:55
How to Filter Signals on Markers using the Slope of a Line
 0:08:33
0:08:33
Passive RC low pass filter tutorial!
 0:12:12
0:12:12
3. Test Signals - Digital Filter Basics
 0:02:41
0:02:41
Using High and Low-Pass Filters to Clean Up Signals
 0:42:47
0:42:47
Signal Theory (Signals and Systems) - Lecture 4 - Filtering in Spectral and Time Domain
 0:02:06
0:02:06
17 - Complex valued filters and signals
 0:11:17
0:11:17
Series 2 Lecture 34 Filtering of Biomedical Signals
 0:12:27
0:12:27
Overview of FIR and IIR Filters
 0:05:49
0:05:49
Graph signals and filtering by Mora Blasters
 0:11:17
0:11:17
Lecture 13 Filtering of Biomedical Signals
 0:08:34
0:08:34
The Best ATM Filter for Precise Buy & Sell Signals On Tradingview_Zero Fake Signals
 0:00:40
0:00:40
How to Filter False Signals in Overbought/Oversold Zones
 0:56:43
0:56:43
Filtering for Dynamic Signals Part II
 0:01:37
0:01:37
Signals and Systems: Filtering Basics (Arabic Narration)
 0:10:59
0:10:59
The Trend Indicator That Filters Out 99% Of False Signals
Комментарии