filmov
tv
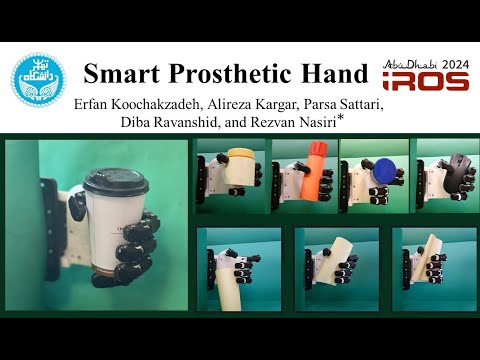
Prosthetic Hand Design Experiments

Показать описание
Title: Seven Benefits of Using Series Elastic Actuators in the Design of an Affordable, Simple Controlled, and Functional Prosthetic Hand
This video demonstrates the innovative design and functionality of a 3D-printed prosthetic hand developed using series elastic actuators (SEA). Our research, conducted at the Research Institute for Robotics, Artificial Intelligence, and Information Science (RAIIS Lab), explores how SEA technology enables cost-effective, easily controlled, and highly functional prosthetic devices.
Key Features of the Prosthetic Hand:
Series Elastic Actuators (SEA): Utilized in an antagonistic configuration with two motors, ensuring precise control and efficient performance.
Design and Control: The hand's underactuated design includes adjustable thumbs and optimized pulley diameters for synchronized finger movements during flexion and extension.
Functional Capabilities: Simple motor position control enables features like hand position control, morphological grasp, force control, impedance control, slippage detection, safe interaction, and efficient grasp.
Experiment Overview: This video showcases a series of experiments conducted to evaluate the performance of the prosthetic hand. The results confirm the hand’s effective operation and highlight areas for future improvement, such as minimizing friction in cables and joints, enhancing sensor resolution, and integrating a motor brake system for more efficient grasping.
Authors: Erfan Koochakzadeh, Alireza Kargar, Parsa Sattari, Diba Ravanshid, and Rezvan Nasiri*
Conference: This work has been accepted for presentation at IROS 2024.
Subscribe:
Connect with us:
LinkedIn: @raiis-lab
This video demonstrates the innovative design and functionality of a 3D-printed prosthetic hand developed using series elastic actuators (SEA). Our research, conducted at the Research Institute for Robotics, Artificial Intelligence, and Information Science (RAIIS Lab), explores how SEA technology enables cost-effective, easily controlled, and highly functional prosthetic devices.
Key Features of the Prosthetic Hand:
Series Elastic Actuators (SEA): Utilized in an antagonistic configuration with two motors, ensuring precise control and efficient performance.
Design and Control: The hand's underactuated design includes adjustable thumbs and optimized pulley diameters for synchronized finger movements during flexion and extension.
Functional Capabilities: Simple motor position control enables features like hand position control, morphological grasp, force control, impedance control, slippage detection, safe interaction, and efficient grasp.
Experiment Overview: This video showcases a series of experiments conducted to evaluate the performance of the prosthetic hand. The results confirm the hand’s effective operation and highlight areas for future improvement, such as minimizing friction in cables and joints, enhancing sensor resolution, and integrating a motor brake system for more efficient grasping.
Authors: Erfan Koochakzadeh, Alireza Kargar, Parsa Sattari, Diba Ravanshid, and Rezvan Nasiri*
Conference: This work has been accepted for presentation at IROS 2024.
Subscribe:
Connect with us:
LinkedIn: @raiis-lab
 0:01:53
0:01:53
Check out the Awesome things I Can Do With My Prosthetic Hand!
 0:01:01
0:01:01
Prosthetic Hand Design Experiments
 0:00:20
0:00:20
V1 #DexHand low cost $300 BOM #robot #hand #fingers simple co-ordination #diy
 0:01:11
0:01:11
Another update on my partial hand prosthetic, now with splay!
 0:09:34
0:09:34
How Mind-Controlled Bionic Arms Fuse To The Body | WIRED
 0:24:49
0:24:49
Amazing Process of Making Realistic Prosthetic Arm. Korean Artificial Hand Artisan
 0:15:15
0:15:15
Arduino Flex Sensor controlled Robot Hand | Prosthetic Hand
 0:05:09
0:05:09
How I built a bionic arm from scratch to replicate human hand movements.
 0:15:00
0:15:00
How to Build Your Own Biomimetic Bionic Hand
 0:00:27
0:00:27
Roujin Project - InMoov Arm and EMG 1
 0:00:46
0:00:46
3D Printed Controllable Prosthetic Hand via EMG
 0:04:06
0:04:06
How To Make a Robotic Hand | DIY Paper Robot Hand | Science Project
 0:10:08
0:10:08
Building a Robot Hand from Scratch
 0:05:16
0:05:16
Make a Robotic Hand with Straws | Science Project
 0:08:07
0:08:07
how to make robot hand moving using muscle at your home
 0:05:47
0:05:47
Every Prototype that Led to a Realistic Prosthetic Arm | WIRED
 0:00:07
0:00:07
How To Make Bionic Hand | Bionic Finger | Robotic Hand | Iron Man | Iron Hand | The Most Viral Video
 0:01:55
0:01:55
Ultra-precise, mind-controlled prosthetic hand for amputees via RPNI neural interface
 0:01:00
0:01:00
Steampunk Mechanical Prosthetic Hand Update 5 #shorts
 0:00:15
0:00:15
How to Make a Robotic Arm from Cardboard #shorts #lifehacks
 0:01:40
0:01:40
Single Actuator Prosthetic Hand Design
 0:00:27
0:00:27
Prosthetic Hand STEAM 2018
 0:00:07
0:00:07
DIY Prosthetic Hand Test
 0:00:09
0:00:09
Prima Prosthetics: Pinch Gesture
Комментарии