filmov
tv
Algebraic structure on the Euclidean projective line | Rational Geometry Math Foundations 137
Показать описание
In this video we look at some pleasant consequences of imposing a Euclidean structure on the projective line. We give a proof of the fundamental projective Triple quad formula, talk about the equal p-quadrances theorem, and see how the logistic map of chaos theory makes its appearance as the second Spread polynomial.
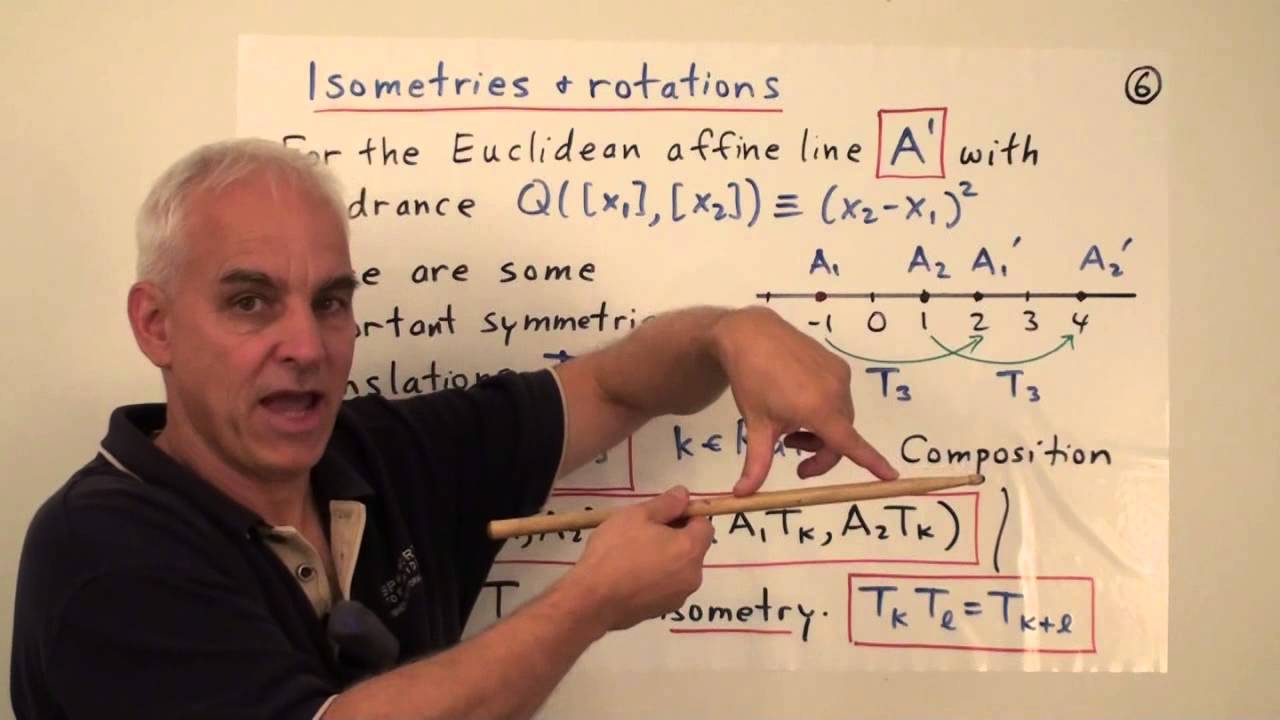
We also introduce rotations and reflections in this one-dimensional situation, and see how the composition of rotations naturally leads to an algebraic structure on the projective line. This multiplication is a one-dimensional version of complex number multiplication.
Video Content:
00:00 Introduction
4:22 The projective TQF (Triple Spread Formula)
9:34 How to establish the P-TQF
15:22 Equal projective- quadrance theorem
18:06 The logistic map
20:32 Isometries and rotations
25:03 Euclidean projective line
30:36 Rotation isometry theorem
35:38 Composition of Rotations
************************
Here are the Insights into Mathematics Playlists:
We also introduce rotations and reflections in this one-dimensional situation, and see how the composition of rotations naturally leads to an algebraic structure on the projective line. This multiplication is a one-dimensional version of complex number multiplication.
Video Content:
00:00 Introduction
4:22 The projective TQF (Triple Spread Formula)
9:34 How to establish the P-TQF
15:22 Equal projective- quadrance theorem
18:06 The logistic map
20:32 Isometries and rotations
25:03 Euclidean projective line
30:36 Rotation isometry theorem
35:38 Composition of Rotations
************************
Here are the Insights into Mathematics Playlists:
 0:40:41
0:40:41
Algebraic structure on the Euclidean projective line | Rational Geometry Math Foundations 137
 0:17:11
0:17:11
Abstract Algebra | Introduction to Euclidean Domains
 0:21:58
0:21:58
Group theory, abstraction, and the 196,883-dimensional monster
 0:56:33
0:56:33
Euclidean and Algebraic Geometry, David Cox [2014]
 0:00:38
0:00:38
Why greatest Mathematicians are not trying to prove Riemann Hypothesis? || #short #terencetao #maths
 0:01:15
0:01:15
Is Algebraic Structure Inherent in Perception?
 0:13:04
0:13:04
Rings, Fields and Finite Fields
 0:03:01
0:03:01
Algebra, Geometry, and Topology: What's The Difference?
 0:05:45
0:05:45
What does a ≡ b (mod n) mean? Basic Modular Arithmetic, Congruence
 0:29:38
0:29:38
Symmetries of Euclidean Space R^n
 0:16:46
0:16:46
Abstract vector spaces | Chapter 16, Essence of linear algebra
 0:30:09
0:30:09
Visual Group Theory: Lecture 7.5: Euclidean domains and algebraic integers
 0:44:50
0:44:50
Euclidean Domains | Modern Algebra
 0:00:37
0:00:37
When mathematicians get bored (ep1)
 0:05:11
0:05:11
Is math discovered or invented? - Jeff Dekofsky
 0:30:45
0:30:45
Abstract Algebra, Lec 10A: Euclidean Algorithm, Subgroup Lattices, Permutation Groups
 0:07:37
0:07:37
Euclidean Space
 0:10:02
0:10:02
EUCLIDEAN ALGORITHM - DISCRETE MATHEMATICS
 0:21:08
0:21:08
Euclidean ring posses a unit element # Algebraic structures
 0:04:46
0:04:46
Mathematics: From Euclidean Geometry to Set Theory
 0:00:25
0:00:25
Maths vs Physics
 0:41:52
0:41:52
Advanced Linear Algebra, Lecture 5.1: Inner products and Euclidean structure
 0:05:48
0:05:48
Transport of Algebraic Structure to Latent Embeddings
 0:00:36
0:00:36
Algebraic structure Meaning
Комментарии