filmov
tv
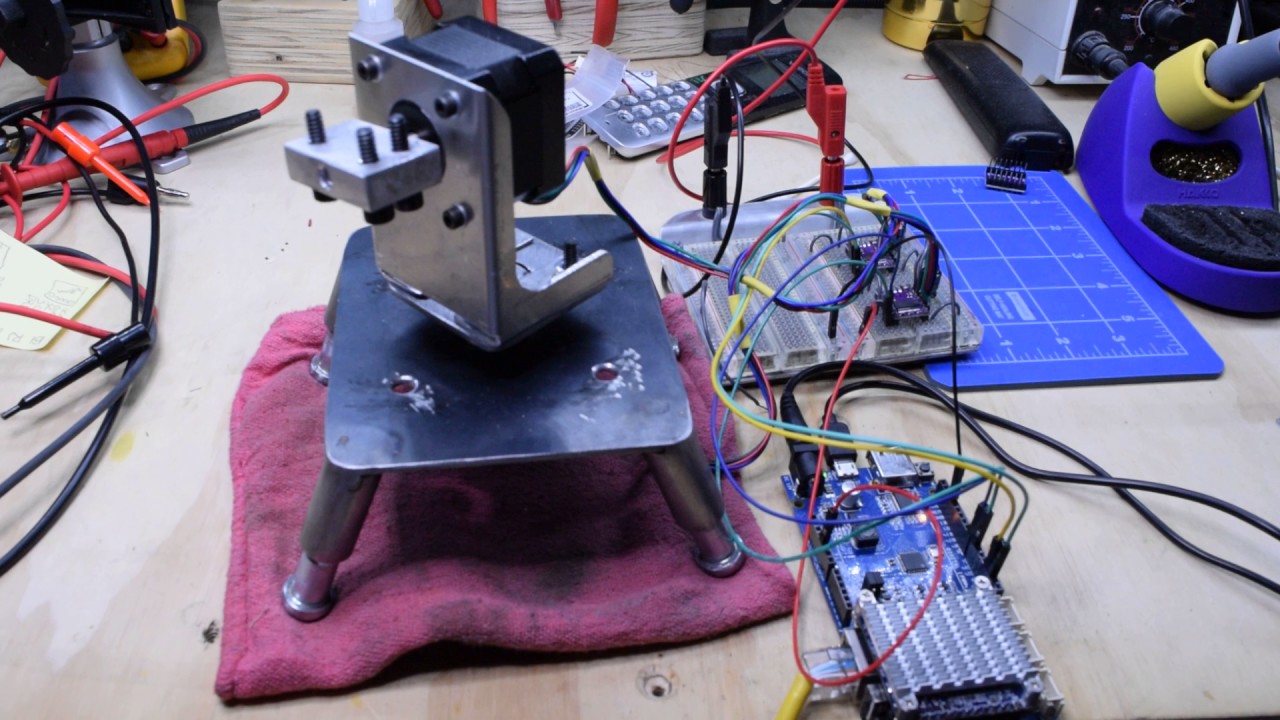
Stepper Motor Platform Testing
Показать описание
Using a FriendlyElec NEO with an UNO Dock to run the stepper motors. Python on the NEO communicates via i2c to the Arduino, to send commands. Weight turned out to be a huge issue, these were the least powerful stepper motors I found, really had to lighten up the design.
 0:00:12
0:00:12
 0:00:38
0:00:38
 0:00:23
0:00:23
 0:00:31
0:00:31
 0:00:17
0:00:17
 0:00:26
0:00:26
 0:31:29
0:31:29
 0:00:15
0:00:15
 0:00:37
0:00:37
 0:02:32
0:02:32
 0:00:29
0:00:29
 0:00:28
0:00:28
 0:00:05
0:00:05
 0:00:16
0:00:16
 0:00:20
0:00:20
 0:00:16
0:00:16
 0:00:23
0:00:23
 0:29:57
0:29:57
 0:02:17
0:02:17
 0:01:08
0:01:08
 0:00:34
0:00:34
 0:02:02
0:02:02
 0:15:47
0:15:47
 0:00:08
0:00:08