filmov
tv
Peer to Peer Clients for Mobile Robot Control
Показать описание
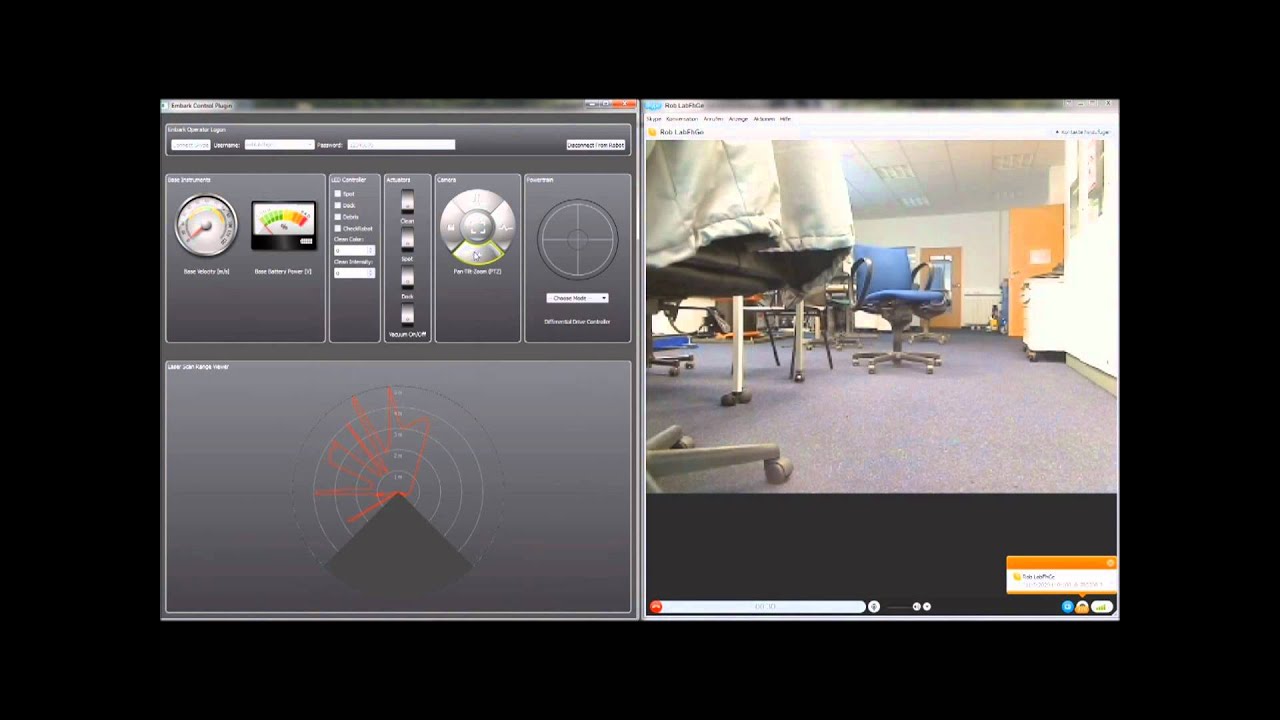
Guiding mobile robots, as in teleoperating, requires a distributed system, consisting of a robot control software and an Human-Machine Interface (HMI) for the operator. This video shows a novel approach, towards incorporating Peer-to-peer (P2P) networks for teleoperation of mobile robots throughout Wide Area Networks(WAN), as well as Local Area Networks (LAN). This is achieved by implementing a new operating interface, containing a Skype plugin, wich is built up as a graphical user interface and comes along with audio and video windows. Utilizing Skype P2P technology, the client software is relieved of being responsible for the network layer, secure authentication and high performance audio and video streaming. Since Skype is routed through firewalls, the teleoperation system proposed is easily usable by humans. The design of the interface is led by the hypothesis, that the operator using the controls, is familiar with the Skype audio and video window, joystick control and a map visualization similar to the ones used in ego-shooter game play. The usage of the teleoperation software, is made far more intuitive and consumer friendly than in other interfaces. Two major design principles of both the robot control software, and the interface software are the reusability and scalability, so that various robot platforms are supported. In order to reach this result, the service-oriented robot control architecture, middleware ROS (Robot Operating System), and generic software models are used.
 0:02:16
0:02:16
 0:02:58
0:02:58
 0:06:57
0:06:57
 0:04:08
0:04:08
 0:02:59
0:02:59
 0:06:53
0:06:53
 0:13:27
0:13:27
 0:14:09
0:14:09
 0:18:35
0:18:35
 0:07:46
0:07:46
 0:04:11
0:04:11
 0:03:31
0:03:31
 0:02:45
0:02:45
 0:01:52
0:01:52
 0:02:35
0:02:35
 0:07:32
0:07:32
 0:04:45
0:04:45
 0:00:55
0:00:55
 0:03:15
0:03:15
 0:03:22
0:03:22
 0:11:13
0:11:13
 0:00:56
0:00:56
 0:02:25
0:02:25
 0:07:54
0:07:54