filmov
tv
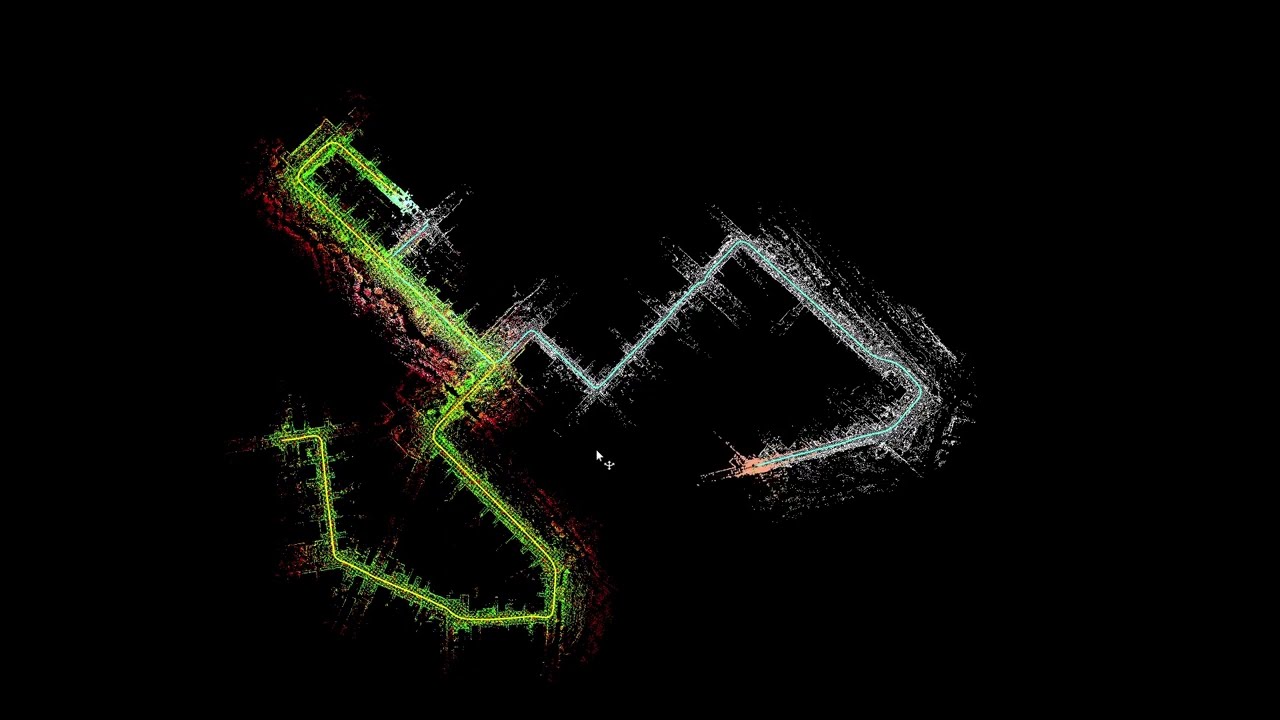
DiSCo-SLAM: Distributed Multi-Robot LiDAR SLAM With Two-Stage Global-Local Graph Optimization
Показать описание
A novel framework is proposed for distributed,multi-robot SLAM intended for use with 3D LiDAR observations. The framework, DiSCo-SLAM, is the first to use the lightweight Scan Context descriptor for multi-robot SLAM, permitting a data-efficient exchange of LiDAR observations among robots. Additionally, this framework includes a two-stage global and local optimization framework for distributed multi-robot SLAM which provides stable localization results that are resilient to the unknown initial conditions that typify the search for inter-robot loop closures. This proposed framework is compared with the widely used distributed Gauss-Seidel (DGS) approach, over a variety of multi-robot datasets, quantitatively demonstrating its accuracy, stability, and data-efficiency.
 0:01:47
0:01:47
DiSCo-SLAM: Distributed Multi-Robot LiDAR SLAM With Two-Stage Global-Local Graph Optimization
 0:01:01
0:01:01
Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned
 0:00:25
0:00:25
Disco Slam
 0:01:09
0:01:09
MSA- Collaborative multi-robot map-making with lidar SLAM
 0:03:01
0:03:01
Kimera-Multi: a System for Distributed Multi-Robot Metric-Semantic SLAM
 0:04:43
0:04:43
Collaborative SLAM using Multi-Robot System
 0:08:39
0:08:39
SLAM AND TEST MULTI ROBOT SIMULATION EP1
 0:00:09
0:00:09
Make a low price slam lidar , with imu , RTK gps.
 0:03:54
0:03:54
Multi-robot Collaborative Monocular SLAM utilizing Rendezvous
 0:03:00
0:03:00
Distributed Variable-Baseline Stereo SLAM from two UAVs
 0:03:01
0:03:01
Visual-Inertial SLAM for a Small Helicopter in Large Outdoor Environments
 0:00:35
0:00:35
Feature-based laser SLAM system (old PUT-robot dataset)
 0:00:11
0:00:11
Distributed Collaborative Control of Heterogeneous Multi-robot Systems
 0:00:35
0:00:35
DEMO - SwarmMap: Scaling Up Real-time Collaborative Visual SLAM at the Edge - NSDI'22
 0:01:19
0:01:19
Swarm-SLAM: Sparse Decentralized C-SLAM Framework for Multi-Robot Systems
 0:03:50
0:03:50
SLAM-based Autonomous Navigation in Rough Terrains
 0:04:05
0:04:05
Feature-Based SLAM: Why Simultaneous Localisation and Mapping?
 0:01:22
0:01:22
hdl graph slam stairs in B5
 0:00:45
0:00:45
Qualcomm RB5 Omnidirectional Robot - Real-time EKF Visual SLAM (Multiple Squares Path)
 0:01:24
0:01:24
Kudan Lidar SLAM: In a large shopping mall for autonomous cleaning/ service robots
 0:02:51
0:02:51
A Comprehensive LiDAR-based SLAM Comparison for Control of Unmanned Aerial Vehicles
 0:04:10
0:04:10
LiDAR SLAM Result
 0:06:00
0:06:00
ICRA 2023 - Cross-Agent Relocalization for Decentralized Collaborative SLAM
 0:01:13
0:01:13
Qualcomm RB5 Omnidirectional Robot - Real-time EKF Visual SLAM (Octagon Path)
Комментарии